|
- Ė▀ ą┬ŹÅ,
╠¶æ:
į┌╬ęéā╔·╗ŅĄ─├└¹ÉĄžŪ“╔ŽŻ¼ĄĮ╠ÄČ╝┤µį┌ų°┤┼ł÷Ż¼ļmšf┤µį┌Ą½╬ęéāėų┐┤▓╗ĄĮŻ¼├■▓╗ ų°Įo╚╦ęį╔±├žĖąĪŻį┌¼F┤·═©ą┼ŅIė“ųąŻ¼┤┼ł÷Ą─æ¬ė├ūŅ×ķÅVĘ║Ż¼┐╔ęį▀\ė├Ųõé„▌öą┼╠¢Ż¼ę▓┐╔ ęįė├╦³üĒĖąų¬ęĢč█ų«═ŌĄ─¢|╬„Ż¼▀MČ°žSĖ╗┴╦╬ęéāĄ─╔·╗ŅĪŻ▒ŠčąŠ┐ųąŻ¼▀\ė├┤┼é„ĖąŲ„üĒĖą£y ╬ó╚§Ą─┤┼ł÷ą┼╠¢Ż¼ī”Öz£yĄĮĄ─ą┼╠¢▀Mąą╠Ä└ĒŻ¼▀MČ°┼ąöÓ┤┼į┤Ą─ĘĮŽ“║═╬╗ų├ĪŻ
ĮŌøQĘĮ░Ė:
═©▀^īŹ“×£yįćŻ¼ŽĄĮy▀\ąąĘĆČ©Ż¼£y┴┐Š½Č╚▒╚▌^Ė▀ĪŻ─┐ś╦┤┼į┤╬╗ų├Č©╬╗▒╚▌^£╩┤_Ż¼Č©╬╗ š`▓ŅąĪė┌5cmŻ¼ŖAĮŪš`▓ŅąĪė┌1 Č╚Ż¼┤┼Šž┤¾ąĪš`▓ŅąĪė┌0.5Am2ĪŻ▓óŪęī”┐Ś╬’Īó╚╦¾wĄ╚┘MĮ ī┘Įķ┘|▓╗├¶ĖąĪŻ£yįćŁhŠ│ę¬Ū¾┐šĢń¤o┤¾Ą─Įī┘¾wĪŻ
ę╗Ż« ę²čį
į┌¼F┤·┐ŲīW╝╝ąg║═╚╦ŅÉ╔·╗ŅųąŻ¼╠Ä╠Ä┐╔ė÷ĄĮ┤┼ł÷Ż¼░lļŖÖCĪóļŖäėÖCĪóūāē║Ų„ĪóļŖł¾ĪóļŖįÆĪó╩šę¶ÖCęįų┴╝ė╦┘Ų„Īó¤ß║╦Š█ūāčbų├ĪóļŖ┤┼£y┴┐āx▒ĒĄ╚¤o▓╗┼c┤┼¼FŽ¾ėąĻPĪŻ╔§ų┴į┌╚╦¾wā╚Ż¼░ķļSų°╔·├³╗ŅäėŻ¼ę╗ą®ĮM┐Ś║═Ų„╣┘ā╚ę▓Ģ■«a╔·╬ó╚§Ą─┤┼ł÷ĪŻ
┤┼ł÷╩Ūę╗ĘN┐┤▓╗ęŖŻ¼Č°ėų├■▓╗ų°Ą─╠ž╩Ō╬’┘|Ż¼╦³Š▀ėą▓©┴ŻĄ─▌Ś╔õ╠žąįĪŻ┤┼¾wų▄ć·┤µį┌┤┼ł÷Ż¼┤┼¾wķgĄ─ŽÓ╗źū„ė├Š═╩Ūęį┤┼ł÷ū„×ķ├ĮĮķĄ─ĪŻļŖ┴„Īó▀\äėļŖ║╔Īó┤┼¾w╗“ūā╗»ļŖł÷ų▄ć·┐šķg┤µį┌Ą─ę╗ĘN╠ž╩Ōą╬æBĄ─╬’┘|ĪŻė╔ė┌┤┼¾wĄ─┤┼ąįüĒį┤ė┌ļŖ┴„Ż¼ļŖ┴„╩ŪļŖ║╔Ą─▀\äėŻ¼ę“Č°Ė┼└©ĄžšfŻ¼┤┼ł÷╩Ūė╔▀\äėļŖ║╔╗“ļŖł÷Ą─ūā╗»Č°«a╔·Ą─ĪŻ
║Ń┤┼ł÷ėųĘQ×ķņo┤┼ł÷Ż¼Č°Į╗ūā┤┼ł÷Īó├}äė┤┼ł÷║═├}ø_┤┼ł÷ī┘ė┌äė┤┼ł÷ĪŻ┤┼ł÷┐šķgĖ„╠ÄĄ─┤┼ł÷ÅŖČ╚ŽÓĄ╚╗“┤¾ų┬ŽÓĄ╚Ą─ĘQ×ķŠ∙ä“┤┼ł÷Ż¼Ę±ätŠ═ĘQ×ķĘŪŠ∙ä“┤┼ł÷ĪŻļxķ_┤┼śO▒Ē├µįĮ▀hŻ¼┤┼ł÷įĮ╚§Ż¼┤┼ł÷ÅŖČ╚│╩╠▌Č╚ūā╗»ĪŻ
Ąž┤┼ł÷╩ŪÅ─Ąžą─ų┴┤┼īėĒöĄ─┐šķgĘČć·ā╚Ą─┤┼ł÷ĪŻĄž┤┼ł÷░³└©╗∙▒Š┤┼ł÷║═ūā╗»┤┼ł÷ā╔éĆ▓┐ĘųŻ¼╦³éāį┌│╔ę“╔Ž═Ļ╚½▓╗═¼ĪŻ╗∙▒Š┤┼ł÷╩ŪĄž┤┼ł÷Ą─ų„ę¬▓┐ĘųŻ¼Ųį┤ė┌ĄžŪ“ā╚▓┐Ż¼▒╚▌^ĘĆČ©Ż¼ūā╗»ĘŪ│ŻŠÅ┬²ĪŻūā╗»┤┼ł÷░³└©Ąž┤┼ł÷Ą─Ė„ĘNČ╠Ų┌ūā╗»Ż¼ų„ę¬Ųį┤ė┌ĄžŪ“═Ō▓┐Ż¼▓óŪę║▄╬ó╚§ĪŻ
ĄžŪ“Ą─╗∙▒Š┤┼ł÷┐╔Ęų×ķ┼╝śOūė┤┼ł÷ĪóĘŪ┼╝śOūė┤┼ł÷║═Ąž┤┼«É│ŻÄūéĆĮM│╔▓┐ĘųĪŻ┼╝śOūė┤┼ł÷╩ŪĄž┤┼ł÷Ą─╗∙▒Š│╔ĘųŻ¼ŲõÅŖČ╚╝sš╝Ąž┤┼ł÷┐éÅŖČ╚Ą─90%Ż¼«a╔·ė┌ĄžŪ“ę║æB═Ō║╦ā╚Ą─ļŖ┤┼┴„¾w┴”īW▀^│╠Ż¼╝┤ūį╝ż░lļŖÖCą¦æ¬į┌╚╦ŅÉ┐Ų╝╝░lš╣Ą─ķL║ėųąŻ¼╚╦éā▓╗āHšJūRņo┤┼ł÷Ą─╠žąįŻ¼Č°Ūę▓╗öÓĄ─šJų¬äė┤┼ł÷╠žąįŻ¼▓ó└¹ė├╦³üĒčą░lą┬Ą─įOéõŻ¼▓ó▓╗öÓöUš╣Ųõæ¬ė├ŅIė“Ż¼▒╚╚ńŻ║╔·╬’ßtīWĪóļŖūė═©ą┼Ą╚ŅIė“ĪŻ
Č■Ż« ▒│Š░
╗∙ė┌ė└┤┼¾w╗“Į╗ūā┤┼į┤┐šķg┤┼ł÷Öz£yĄ─┤┼Č©╬╗ĘĮĘ©╩Ū└¹ė├┤┼¾w«a╔·Ą─┤┼ł÷ėą╠žČ©Ą─Ęų▓╝ęÄ┬╔▀@ę╗╠ž³cŻ¼═©▀^Öz£y─┐ś╦ė└┤┼¾w╗“Į╗ūā┤┼į┤Ą─┐šķg┤┼ł÷üĒ─µŪ¾│÷─┐ś╦┤┼¾wĄ─╬╗ų├Īó┤¾ąĪ╝░ū╦æBą┼ŽóĪŻ
į┌╔·╬’ßtīWŅIė“ųąŻ¼¤oäōĮķ╚ļ╩Į╬óą═į\»¤čbų├┐╔ęį▒╗æ¬ė├ė┌╚╦¾wŽ¹╗»Ą└łDŽ±▓╔╝»┼cé„▌öĪó░ąŽ“ßī╦ÄĪó¾wę║▓╔╝»ĪóŽ¹╗»Ą└╔·└ĒģóöĄ╠ß╚ĪĄ╚ĘĮ├µŻ¼ī”ė┌╬óą═į\»¤čbų├į┌¾wā╚Ą─īŹĢrČ©╬╗ė┌Ė·█Öį┌īŹļHæ¬ė├ųąėąųžę¬ęŌ┴xĪŻ▓╔ė├╗∙ė┌ė└┤┼¾w╗“Į╗ūā┤┼į┤┐šķg┤┼ł÷Öz£yĄ─┤┼Č©╬╗ĘĮĘ©üĒīŹĢrĖ·█Ö╬óą═į\»¤čbų├╗“Ųõ╦¹Į╗ūā┤┼į┤Ą─╬╗ų├╝░┤┼į┤┤¾ąĪĪŻ┼cŲõ╦¹Č©╬╗ĘĮĘ©ŽÓ▒╚Ż¼įōĘĮĘ©ėąų°Č©╬╗Š½Č╚Ė▀ĪóųŲū„║═▀\ąą│╔▒ŠĄ═Īó▒Ńöyąį║├Ż¼ī”╚╦¾w¤oČŠĖ▒ū„ė├Ż¼▓ó─▄īŹ¼FīŹĢrČ©╬╗ė┌▀B└mĖ·█ÖĄ╚ā׳cĪŻ▒Š┤┼Č©╬╗ĘĮĘ©Ż¼ę“▓╔ė├Ą─┤┼é„ĖąŲ„▓╗═¼Ż¼┐╔ęį═žš╣ĄĮŲõ╦¹Ą─┤┼į┤Öz£y╝░Č©╬╗ĪŻŽĄĮyš¹¾w▒O£yĄ─ųĖś╦ģóöĄėąŻ║┤┼į┤Ą─┤┼Šž┤¾ąĪĪó╬╗ų├ū°ś╦╝░┐šķgŖAĮŪ┤¾ąĪĪŻ
╚²Ż« ┤┼┼╝śOūė─Żą═
«öį┤³cĄĮł÷³cĄ─ŠÓļx▀h┤¾ė┌┤┼į┤Ą─│▀┤ńĢr, ┐╔īó┤┼į┤Į³╦Ų×ķ┤┼┼╝śOūė, ▀MČ°ė├┤┼┼╝śOūė─Żą═üĒėŗ╦Ńł÷³c╠ÄĄ─┤┼Ėąæ¬ÅŖČ╚ĪŻįO┤┼į┤Ą─ū°ś╦×ķ(x0 , y0, z0), ┤┼┼╝śOŠž×ķm(mx, my, mz ), ł÷³cp Ą─
ū°ś╦×ķ(x, y, z), į┤³cĄĮł÷³cĄ─╩ĖÅĮ×ķr, m ┼cz ▌Sš²ĘĮŽ“Ą─ŖAĮŪ×ķθ,m į┌xoy ŲĮ├µ╔ŽĄ─═Čė░┼cx ▌Sš²ĘĮŽ“Ą─ŖAĮŪ×ķφ, ╚ńłD3-1 ╦∙╩ŠĪŻįO┤┼┼╝śOŠžĄ─┤¾ąĪ×ķm, ätėą: mx =msinθcosφ, my=msinθsinφ,mz = mcosθĪŻĖ∙ō■┤┼┼╝śOūė─Żą═, ł÷³cp ╠ÄĄ─┤┼Ėąæ¬ÅŖČ╚B Ą─╩Ė┴┐▒Ē▀_╩Į×ķŻ║

(╣½╩Į3-1)
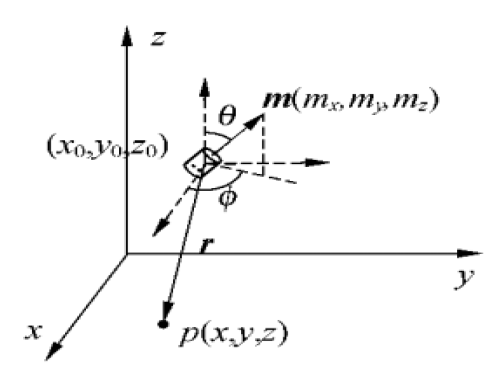
łD3-1 ┤┼į┤╬╗ų├║═ĘĮŽ“
ūóŻ║«öł÷³c┼cį┤³cĄ─ŠÓļx┤¾ė┌8 ▒Č┤┼į┤│▀┤ńĢr, ┤┼┼╝śOūė─Żą═│╔┴óĪŻ
╦─Ż« ┐é¾wįOėŗ
4.1Īó┤┼┼╝śOūė─Żą═Ęų╬÷ĘĮĘ©
╩╣ė├┤┼é„ĖąŲ„üĒÖz£y┤┼į┤┤┼ł÷┐šķgĘų▓╝Ą─ĘĮĘ©ųąŻ¼Č╝╩Ūīó─┐ś╦Ą─▀hł÷Ą╚ą¦×ķ┤┼┼╝śOūėŻ¼┤┼┼╝śOūė─Żą═Ęų╬÷ųąėąā╔ĘNĘĮĘ©Ż║ę╗ĘN╩Ū╩Ė┴┐─Żą═Ęų╬÷Ż¼┴Ēę╗ĘN╩Ūś╦┴┐─Żą═Ęų╬÷ĪŻ
į┌╩Ė┴┐─Żą═Ęų╬÷ųąŻ¼▒žĒÜ£y┴┐─┐ś╦Ą─╚²Ęų┴┐┤┼ł÷öĄō■Ż¼┤╦Ģr▓╔ė├Ą═įļ┬ĢĪóĖ▀ņ`├¶Č╚Ą─┤┼é„ĖąŲ„▀Mąą┤┼ł÷╚²Ęų┴┐öĄō■▓╔╝»ĪŻ╚¶┤┼é„ĖąŲ„ąį─▄▓╗║├Ż¼ė╔ė┌Ė╔ö_┤┼ł÷įļ┬ĢĄ─ė░ĒæŻ¼ī¦ų┬─┐ś╦┤┼ł÷Ą─öĄō■č═ø]į┌įļ┬ĢųąŻ¼║▄ļy▀Mąą─┐ś╦Č©╬╗║═┤¾ąĪ┼ąöÓĪŻę“┤╦Ż¼ąĶę¬┤┼é„ĖąŲ„įļ┬Ģ║▄Ą═ĪŻ
į┌ś╦┴┐─Żą═Ęų╬÷ųąŻ¼┐╔ęį└¹ė├Ė▀Š½Č╚╣Ō▒├┤┼ÅŖėŗ£y┴┐┤┼ł÷öĄō■Ż¼Įø▀^▄ø╝■čaāö║¾Š½Č╚┐╔ęį▀_ĄĮ1nT ęįŽ┬ĪŻįōĘų╬÷ųąŻ¼═©▀^Ė▀═©×V▓©Ų„Ą├ĄĮ─┐ś╦┤┼┼╝śOūėĄ─┤┼ł÷ą┼╠¢Ż¼į┘┤·╚ļ┤┼┼╝śOūė╩Ė┴┐┤┼ł÷ėŗ╦Ń╣½╩ĮŻ¼Įø╗»║åŻ¼Ą├ĄĮ3 éĆĘŪŠĆąįĘĮ│╠Ż¼┼╝śOūėś╦┴┐ą┼╠¢┐╔ęįė╔▀@3 éĆĘŪŠĆąį║»öĄĄ─ŠĆąį»B╝ėüĒ▒Ē╩ŠĪŻĮø▀^ą┼╠¢ūė┐šķgÖz£y║═ģóöĄ╣└ėŗĘĮĘ©Ż¼┐╔ęįĄ├ĄĮ─┐ś╦┤┼į┤Ą─╬╗ų├╝░ū°ś╦ĪŻ
▒ŠčąŠ┐ųąŻ¼▓╔ė├╩Ė┴┐─Żą═▀Mąą─┐ś╦┤┼į┤Ą─Č©╬╗ĪŻ
4.2ĪóŽĄĮyĮM│╔
Ė∙ō■ŽĄĮyČ©╬╗ę¬Ū¾Ż¼▒ŠŽĄĮy░³║¼ęįŽ┬ūė─ŻēKŻ║
1)Īó┤┼é„ĖąŲ„─ŻēKŻ¼╣”─▄Ż║īŹ¼Fą┼╠¢Ą─ūāōQĪóÖz£y╝░Ę┼┤¾ĪŻ
2)ĪóöĄō■▓╔╝»┼cé„▌ö─ŻēKŻ¼╣”─▄Ż║īóÖz£yĄĮĄ─ą┼╠¢▐DōQ×ķöĄūųą┼╠¢Ż¼▓ó═Ļ│╔▀h│╠é„▌öĪŻ
3)ĪóöĄō■╠Ä└Ē┼c¼FīŹ─ŻēKŻ¼╣”─▄Ż║īóÖz£yĄ─öĄūųą┼╠¢▀Mąą╦ŃĘ©╠Ä└ĒŻ¼ėŗ╦Ń│÷─┐ś╦┤┼į┤Ą─┤¾ąĪ║═╬╗ų├ą┼ŽóŻ¼▓ó’@╩Šėŗ╦ŃĮY╣¹ųĄĪŻ
ŲõĮY╣¹╩ŠęŌłD╚ńłD4-1 ╦∙╩ŠŻ║
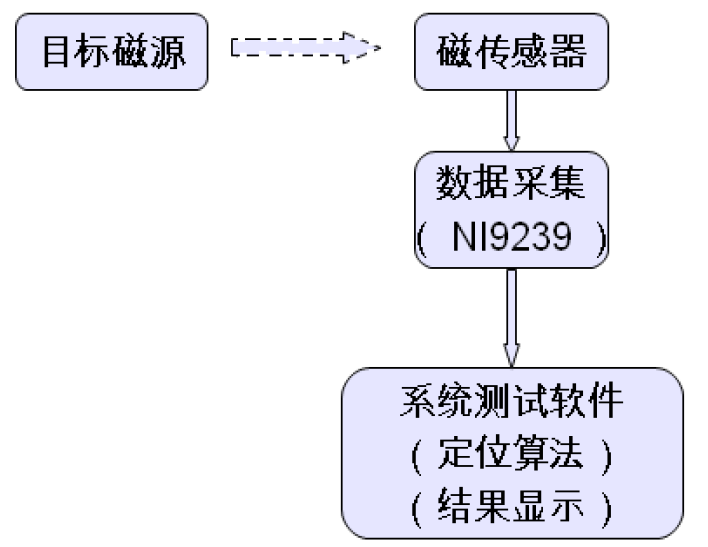
łD 4-1 ŽĄĮyĮM│╔┐“łD
į┌łD4-1 ųąŻ¼┤┼é„ĖąŲ„─ŻēK▓╔ė├Ė▀ņ`├¶Č╚ĪóĄ═įļ┬ĢĄ─╚²▌S┤┼é„ĖąŲ„Ż¼¾wĘeąĪŪ╔Ż¼┐╔ęįīŹ¼F┤┼ł÷ą┼╠¢Ą─╚²Ęų┴┐Öz£yĪŻöĄō■▓╔╝»─ŻēK▓╔ė├NI Ą─Ė▀Ęų▒µ┬╩Ė▀▓╔śė┬╩Ą─▓╔╝»┐©9239Ż¼═Ļ│╔ī”┤┼ł÷ļŖē║ą┼╠¢ĄĮöĄūųą┼╠¢Ą─▐DōQŻ¼▓óĮø▀^USB é„▌öŠĆŻ¼īó▓╔╝»ĄĮĄ─öĄō■╔Žé„ĄĮŽĄĮy£yįć▄ø╝■Ż¼Įø▄ø╝■╠Ä└Ē║¾Ż¼ėŗ╦Ń│÷─┐ś╦┤┼į┤Ą─╬╗ų├║═┤¾ąĪĪŻ
4.3 ─┐ś╦┤┼į┤Č©╬╗╦ŃĘ©
Ė∙ō■┤┼┼╝śOūė─Ż╩ĮŻ¼═©▀^╩Ė┴┐┤┼ł÷ÅŖČ╚ėŗ╦Ń╣½╩ĮĄ├ĄĮ─┐ś╦┤┼ł÷ą┼╠¢Ą─3 Ęų┴┐ĘĮ│╠ĮMŻ¼╚ń╣½╩Į4-1Īó4-2Īó4-3 ╦∙╩ŠŻ║
═©▀^╣½╩Į4-1Īó4-2Īó4-3 ėŗ╦Ń│÷─┐ś╦┤┼į┤Ą─3 Ęų┴┐┤┼Ėąæ¬ÅŖČ╚Ż¼į┘═©▀^╣½╩Į4-4 ┐╔ęį╦Ń│÷┤┼ł÷3 Ęų┴┐Ą─┤┼ł÷ÅŖČ╚ĪŻ
į┌ęį╔Ž╣½╩ĮųąŻ¼╬ęéā╩╣ė├┴╦╝┘įO┤┼į┤Ą─╬╗ų├öĄō■║═ū╦æBöĄō■Ż¼Č°┤┼Č©╬╗Ą─ūŅĮK─┐Ą─╩Ūėŗ╦Ń│÷─┐ś╦┤┼į┤Ą─╬╗ų├öĄō■║═ū╦æBöĄō■ĪŻ▀@ā╔š▀┐┤╦Ų├¼Č▄Ż¼ŲõīŹ▓ó▓╗├¼Č▄ĪŻ═©▀^╝┘įOĄ─╬╗ų├║═ū╦æBöĄō■┼cīŹļHėŗ╦Ń│÷Ą─öĄō■▒╚▌^Ū¾▓ŅųĄŻ¼╩╣Ą├▓ŅųĄūŅąĪūŅāׯ¼«ö▀_ĄĮ▀@éĆūŅąĪūŅāץ─Śl╝■ĢrŻ¼╬ęéā┐╔ęįšJ×ķ╝┘įOųĄ┐╔ęį▒Ē╩Š─┐ś╦┤┼į┤Ą─īŹļH╬╗ų├║═┤¾ąĪĪŻ▀@śėŠ═┐╔ęį░čŪ¾ĮŌ─┐ś╦┤┼į┤öĄō■å¢Ņ}▐DōQ×ķŪ¾ĮŌĘĮ│╠ĮMūŅąĪūŅā×╗»å¢Ņ}Ż¼īŹ¼FīŹļHå¢Ņ}┼cöĄīWå¢Ņ}Ą─▐DūāĪŻ
ī”ė┌Ū¾ĮŌĘŪŠĆąįĘĮ│╠ĮMĄ─ūŅąĪūŅā×╗»å¢Ņ}Ż¼ĮŌøQĄ─ĘĮĘ©║▄ČÓŻ¼╚ń╣▓▄Ś╠▌Č╚Ę©Īó┼ŻŅDĄ³┤·Ę©Īóå╬╝āą╬Ę©Īó─ŻöM═╦╗Ę©Īó▀zé„╦ŃĘ©Īó╔±ĮøŠWĮjĘ©Ą╚ĪŻ▀@ą®╦ŃĘ©Ė„ėąĖ„Ą─ā×╚▒³cŻ¼ŠC║Ž╩└Įń▀\╦Ń╦┘Č╚ĪóČ©╬╗Š½Č╚║═ŠÄ│╠ļyęū│╠Č╚Ż¼ūŅ║¾▀xė├┼ŻŅDĄ³┤·╦ŃĘ©ĪŻ
4.4ĪóöĄō■▒Ż┤µ
ŽĄĮy▄ø╝■īó├┐┤╬▒O£yėŗ╦Ń│÷Ą─┤┼į┤╬╗ų├Īó┤¾ąĪöĄō■▒Ż┤µ×ķ╬─▒Šą╬╩ĮŻ¼═¼Ģr╠Ē╝ė▒Ż┤µ«öŪ░ŽĄĮyĄ─ĢrķgĪŻ┤²▒O£y╚╬äš═Ļ│╔║¾Ż¼³cō¶łDą╬└LųŲ░┤ŌoŻ¼▄ø╝■═©▀^MathScript ╣سcš{ė├MATLAB │╠ą“Ż¼īó▒Ż┤µĄ─╬╗ų├Īó┤¾ąĪöĄō■┼cī”æ¬Ą─Ģrķg└LųŲ│╔ę╗éĆ╚²ŠS┴ó¾włDą╬Ż¼▓óų▒ė^Ą─▒Ē¼F│÷─┐ś╦┤┼į┤Ą─╬╗ų├║═┤¾ąĪĪŻ
╬ÕŻ« ▄ø╝■īŹ¼F║═īŹ“×ĮY╣¹
─┐ś╦┤┼Č©╬╗ŽĄĮy£yįć▄ø╝■╩Ūė╔Labview2012 įu╣└░µ▄ø╝■ŠÄīæīŹ¼FŻ¼▄ø╝■ų„ę¬░³└©öĄō■▓╔╝»ĪóöĄō■ūx╚ĪĪóČ©╬╗ėŗ╦ŃĪóĮY╣¹’@╩ŠĪóą┼╠¢▓©ą╬’@╩ŠĪóöĄō■▒Ż┤µĄ╚╣”─▄─ŻēKĪŻöĄō■▓╔╝»▀^│╠ųąŻ¼═©▀^╬’└Ē═©Ą└ūx╚ĪNI9239 ▓╔╝»Ą─┤┼ł÷3 Ęų┴┐öĄō■Ż¼▓óīóöĄō■é„ĮoČ©╬╗╦ŃĘ©─ŻēKŻ¼ė╔Ųõėŗ╦Ń│÷─┐ś╦┤┼į┤Ą─╬╗ų├Īó┤¾ąĪ║═ū╦æBģóöĄŻ¼▓óį┌ŽĄĮy▄ø╝■╔Ž’@╩Šėŗ╦ŃĮY╣¹ĪŻČ©╬╗ŽĄĮyį┌ąĪė┌2s Ą─Ģrķgā╚═Ļ│╔1 ĮMöĄō■Ą─╠Ä└ĒŻ¼ėŗ╦Ń▓ó’@╩Š│÷─┐ś╦┤┼į┤Ą─╬╗ų├╝░┤¾ąĪĪŻĖ∙ō■─┐ś╦ęŲäėĄ─╬╗ų├║═ĢrķgĻPŽĄŻ¼ŽĄĮy▄ø╝■Š═┐╔ęį└LųŲ│÷─┐ś╦ęŲäė▄ē█EĪŻÅ─Č°Ż¼╗∙▒ŠīŹ¼F─┐ś╦Ą─īŹĢrĖ·█Ö║═Č©╬╗ĪŻ
ŽĄĮy▄ø╝■’@╩ŠĮń├µ╚ńłD5-1 ╦∙╩ŠŻ║
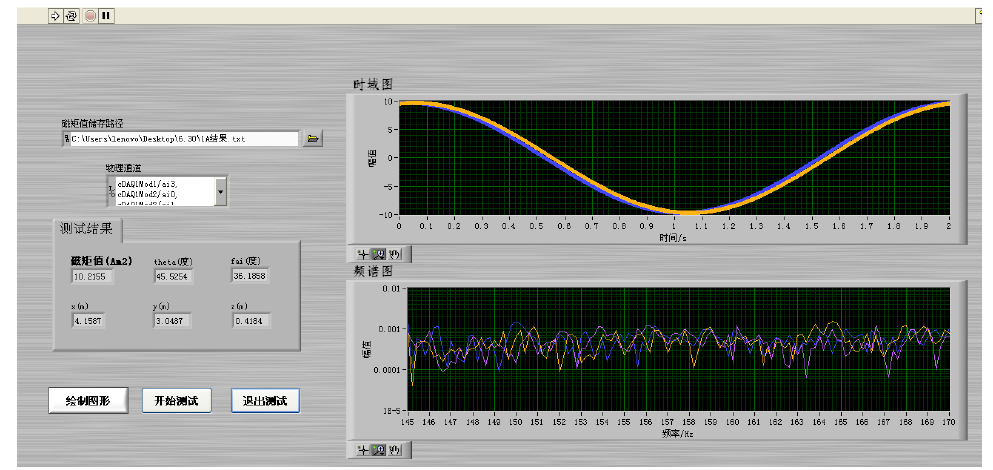
łD 5-1 ŽĄĮy▄ø╝■Įń├µ
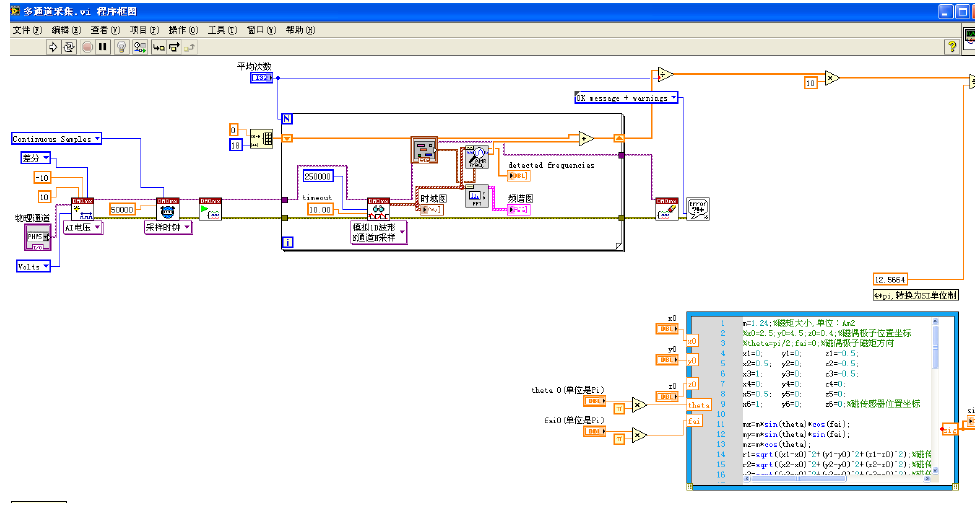
łD5-2 ▓┐Ęų│╠ą“
═©▀^īŹ“×£yįćŻ¼ŽĄĮy▀\ąąĘĆČ©Ż¼£y┴┐Š½Č╚▒╚▌^Ė▀ĪŻ─┐ś╦┤┼į┤╬╗ų├Č©╬╗▒╚▌^£╩┤_Ż¼Č©╬╗š`▓ŅąĪė┌5cmŻ¼ŖAĮŪš`▓ŅąĪė┌1 Č╚Ż¼┤┼Šž┤¾ąĪš`▓ŅąĪė┌0.5Am2ĪŻ▓óŪęī”┐Ś╬’Īó╚╦¾wĄ╚┘MĮī┘Įķ┘|▓╗├¶ĖąĪŻ£yįćŁhŠ│ę¬Ū¾┐šĢń¤o┤¾Ą─Įī┘¾wĪŻ
┴∙Ż« ĮYšō
īŹ“×ųąĄ─Č©╬╗š`▓Ņų„ę¬üĒį┤ė┌ęįŽ┬ÄūéĆĘĮ├µŻ║┤┼┼╝śOūė─Żą═š`▓ŅĪó╦ŃĘ©š`▓ŅĪóöĄō■£y┴┐š`▓ŅĪóė▓╝■ļŖ┬Ęš`▓Ņ╝░═ŌĮńįļ┬ĢĖ╔ö_š`▓ŅĄ╚ĪŻīŹ“×ųą┤┼į┤Ą─┐šķg┤┼ł÷Ęų▓╝╩Ūė╔┤┼┼╝śOūė─Żą═Į©┴óĄ─Ż¼Č°─Żą═ėą╝┘įOŚl╝■Ż¼▀@┼cīŹļHŪķør┤µį┌▓Ņ«ÉŻ¼ė╔┤╦ĦüĒ─Żą═š`▓ŅĪŻČ©╬╗╦ŃĘ©═©▀^┼ŻŅDĄ³┤·╦ŃĘ©üĒ▒ŲĮ³įOų├Ą─š`▓ŅūŅąĪųĄüĒŪ¾ĮŌĄ─Ż¼ę“┤╦ėŗ╦ŃųĄ┼cīŹļHųĄėąę╗Č©š`▓ŅĪŻ┴Ē═ŌŻ¼īŹ“×ųąĖ„ĘN£y┴┐āxŲ„ę▓Ģ■ę²╚ļš`▓ŅŻ¼ęį╝░ų▄ć·ŁhŠ│įļ┬ĢĖ╔ö_ę“╦žŻ¼▀@ą®Č╝ė░Ēæ┴╦Č©╬╗Š½Č╚ĪŻ
|

