|
�Ϲ�(ji��)�n���҂��v���˶�NPSOģʽԭ����ʹ�÷���������(ji��)�n���҂���Ҫ�v��һ�����ʹ��PSO���܌��F(xi��n)�߾��ȵ��g��ݔ����

ZMC460N�p����������
һ��Ӳ���f��
Ӳ���x�͵���ҪҪ����֧��PSO���ܣ��ٷ���PSO�đ��È��Ϻ��S��(sh��)���x����w����̖��������ZMC460N�p�����\�ӿ���������չ�_��B��
PSO�������ڿ��Ƽ�����c�z�y�ĸ����_/�P��ֱ�����a��ƽ��A�����a����������ɼӹ�܉�E���B�m(x��)���a����������β��a���ٶ��B�m(x��)����ӹ���Ч�ʡ�
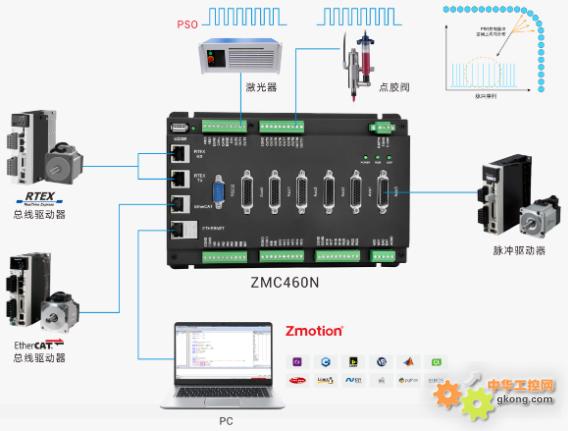
ZMC460N�p����������
ZMC460N�p���������������\�Ӽ��g�Ƴ�����һ���W(w��ng)�j60�S�\�ӿ�������֧��EtherCAT�����S+RTEX�����S+�}�_�S���ʹ�ã����Ԏ������}�_�S�ӿڣ���������}�_ݔ���Ͳ�־��a��ݔ�룩��ͨ��ݔ����֧�����Þ�ζ��}�_ݔ����ͨ��ݔ���֧�����óɆζ˾��a��ݔ�롣�}�_ݔ���l�������_10MHZ��EtherCAT������ͨӍ���������_250�롣
֧��12·PSOݔ����ݔ���ڪ�����֧��12·ͬ�rݔ����ÿ��ϵ�y(t��ng)���ڿɱ��^ݔ����Σ����È��������S����
ZMC460N�p�����������ܘ��D
PSO������Ҫͨ�^“HW_PSWITCH2”Ӳ��λ�ñ��^ݔ��ָ���“HW_TIMER”Ӳ�����rָ��F(xi��n)��������v��һ���@�ɂ�ָ���Ԕ���÷���
����ָ���f��
1.HW_PSWITCH2
���������õ�HW_PSWITCH2���ׂ�ģʽ��ָ���Z���f�����£�
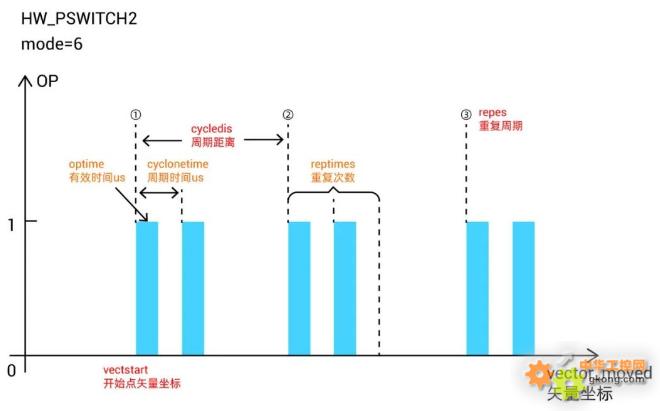
��1��Mode=6��ʸ�����^��ʽ������ģʽ���cHW_TIMERһ��ʹ��
HW_PSWITCH2(6,opnum,opstate,vectstart,repes,cycledis)
mode��6-���ӱ��^��
opnum��������ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
vectstart�����^�cVECTOR_MOVED��ǰ�\�Ӿ��x
repes���؏����ڣ�һ������ֻ���^һ��
cycledis�����ھ��x��ÿ���@�����xݔ��һ��
�� �f���� ��ģʽ�o��TABLE�����˾�����ʸ�����ˣ���vectstart��λ���_ʼ���^��ÿ��cycledis���x�|�l(f��)һ�α��^���؏ͱ��^�����ڞ�repes��ÿ���|�l(f��)���^��̖������̖���}�_������HW_TIMERָ���O�á�
HW_TIMER���Կ��Ƶ��_һ���|�l(f��)�c����OP���D��Σ�HW_TIMER��������ȴ���һ���ڵ��|�l(f��)��
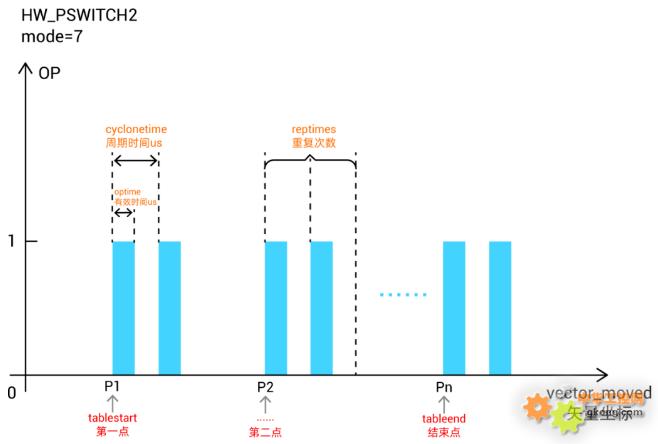
��2��Mode=7��ʸ�����^��ʽ������TABLE���cHW_TIMERһ��ʹ��
HW_PSWITCH2(7,opnum,opstate,tablestart,tableend [,optimeus,optimes,cyctimeus])
mode��7-���ӱ��^����opstate�����D�������cHW_TIMER���ʹ��
opnum��������ݔ����
opstate����һ�����^�c��ݔ����B(t��i)
tablestart����һ�����^�cVECTOR_MOVED��������TABLE��̖
tableend�����һ �����^�cVECTOR_MOVED��������TABLE��̖
[���
���(sh��)��HW_TIMER���xһ��HW_TIMER�Ϊ������ԄӑB(t��i)�{������(sh��)]
optimeus���ӑB(t��i)�{��HW_TIMER����Ч�r�g
optimes���ӑB(t��i)�{��HW_TIMER���|�l(f��)�}�_��(sh��)��0-��ݔ��
cyctimeus���ӑB(t��i)�{��HW_TIMER���}�_���ڕr�g
�� �f���� ���^�c����TABLE�У����˾�����ʸ�����ˣ�ÿ���_һ��TABLE���^ʸ��λ���|�l(f��)OP���˕rOP���}�_���Ⱥ�ÿ���|�l(f��)�ı��^�Δ�(sh��)��HW_TIMER���ƣ����_��һ��TABLEλ�ã�OP�ٴ��|�l(f��)��
2.HW_TIMER
Ӳ�����r��������Ӳ�����^ݔ����һ�Εr�g��߀ԭ�ƽ��HW_TIMERֻ��1����ÿ���{�Õ�����ֹ֮ͣǰ���{�á�
��ʹ�û���^��ɕrʹ��HW_TIMER(0)�P�]��
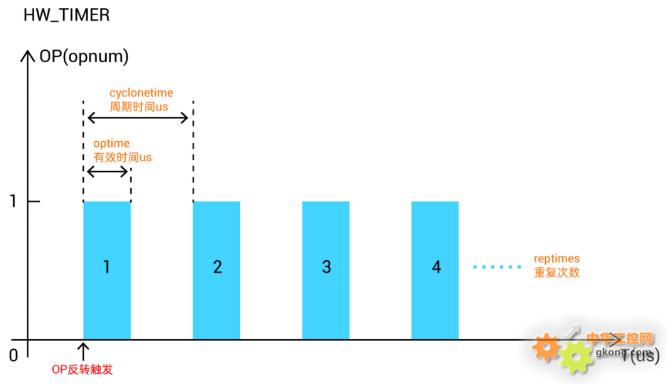
HW_TIMER(mode,cyclonetime,optime,reptimes,opstate,opnum )
mode��0ֹͣ��2-����
cyclonetime�����ڕr�g��us��λ
optime����Ч�r�g��us��λ
reptimes���؏ʹΔ�(sh��)������ģʽ��reptimes =0�r��ܛ�P�]HW_TIMER��ԭ�����}�_�]����ɵģ����^�m(x��)ݔ�����
opstate��ݔ��ȱʡ��B(t��i)��ݔ����׃?y��u)�Ǵˠ�B(t��i)���_ʼӋ�r
opnum��ݔ���ھ�̖�������Ӳ�����^ݔ���Ŀ�
�� �f���� ����(sh��)�O�ÿɅ����·�ʾ��D����ָ���Ч���ǹ̶��r�g����ݔ�����O��ÿ�����ڵ���Чݔ���ĕr�g���؏�ݔ���ĴΔ�(sh��)��
��ʹ��HW_TIMERӲ�����r�o�����棬ֻ���ڿ�����ƽ�_�\�С�
�������S���g��PSOݔ��
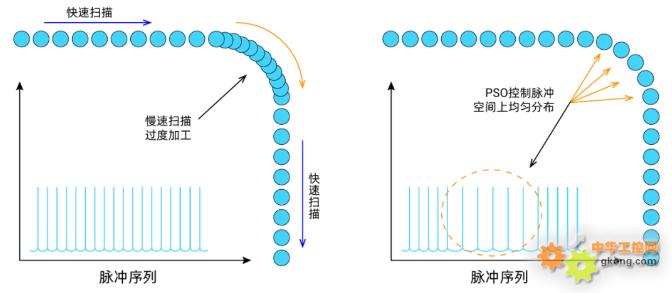
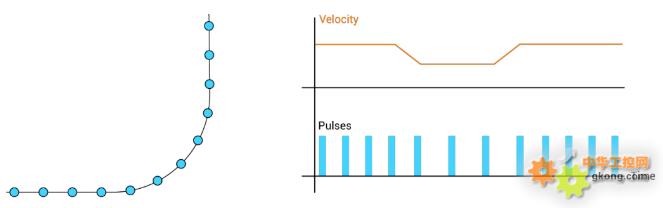
�Ⱦ���^ݔ��ģʽ�������\���ٶȺ��\��܉�E���׃����ʼ�K�̶����xݔ���}�_��ʹ��ݔ���ڿ��g�Ϸֲ��Ǿ���ģ�ʾ��D���¡�
�Ϲ�(ji��)������ģʽ�У��ЎNģʽ���܌��F(xi��n)XYƽ��ĵȾ�ݔ��������F(xi��n)��һ������D��ʾ��܉�E������ֱ��+�A��+ֱ���M�ɣ�ÿ�g��10�����x���^ݔ��һ�Σ�һ�����^12�Σ����g��ݔ���ķ�����Ҋ�·����̵��f����
���̣�����mode=6��ʸ�����^ģʽ���Y��HW_TIMERӲ�����r�����Ã��S�ĺϳ�ʸ��λ��������^�ą�������λ�ã����F(xi��n)�Ϸ�ʾ��D��Ч����ʹ�÷��㣬�o��Ӌ��λ�����ˣ����ȸߡ�
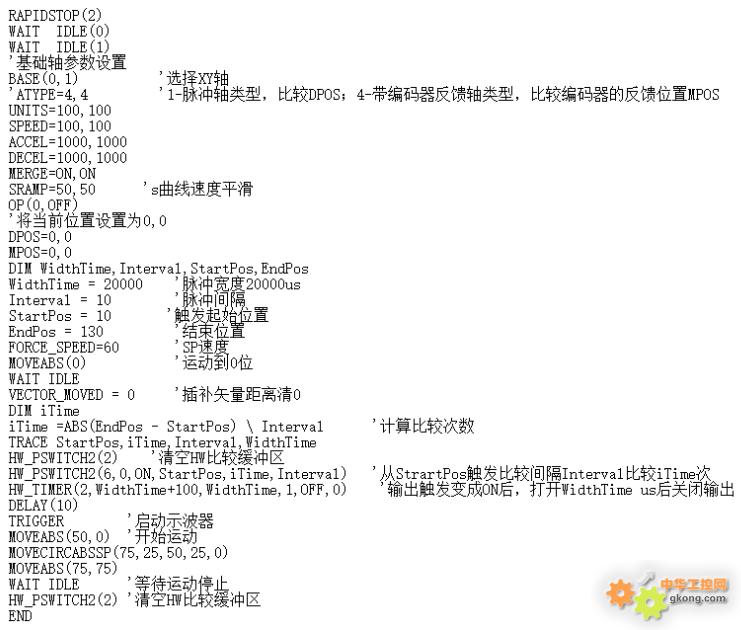
ʾ�����ɘӲ������£��ɘ�5��ͨ���IJ��Σ����Ξ��S0��Ŀ��λ�ã��S1��Ŀ��λ�ã�ݔ����0���S0���S1���a��ʸ���ϳ�λ�ã��S0���S1���a���\���ٶȡ�
ÿ�g��10����λ���x���^һ�Σ�һ�����^12�Σ���HW_TIMER�ɾ��ʿ���ݔ���}�_�Č��ȣ�ݔ���l�ʸ��죬���w���ȸ��ߡ�

XYZģʽ�µı��^ݔ�����Σ�
�C���������Ⱦ���^���ϣ�ʹ��ģʽ6�^�鷽�㣬ֻ��Ҫ�ó����^�ľ��x��OPݔ���ĕr�g���ɣ�ģʽ6�����چ��S�Ͷ��S���a���ϵı��^��ģʽ5��ģʽ7Ҳ�܌��F(xi��n)�������ܡ�
�ġ����S���g��PSOݔ��
1.���S���g��PSOݔ��ʾ��
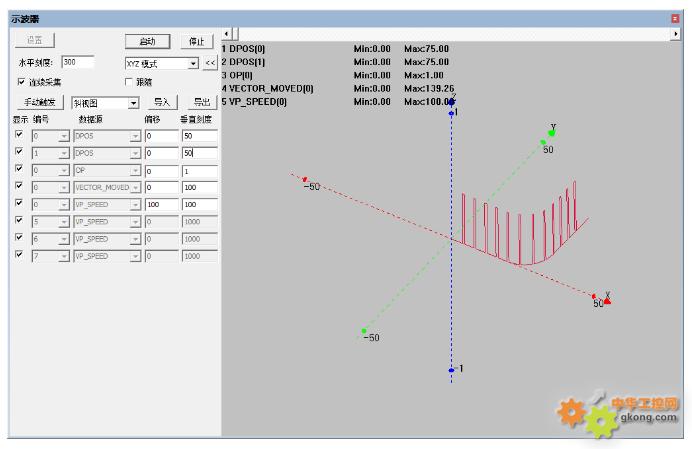
���̣� ����ģʽ7��ģʽ6�ǰ�ָ���O�õ��|�l(f��)���x����ݔ����ģʽ7��ݔ��λ����TABLE�Ĕ�(sh��)��(j��)�c���ƣ�ݔ��λ�ø��`��Ɍ��F(xi��n)�����Ⱦ�ݔ����Ҳ�Ɍ��F(xi��n)�`���g����ݔ����
�����ɘӲ������£��ɘ�6��ͨ���IJ��Σ����Ξ��S0��Ŀ��λ�ã��S1��Ŀ��λ�ã��S2��Ŀ��λ�ã�ݔ����0���S0�S1�S2���a��ʸ���ϳ�λ�ã��S0�S1�S2���a���\���ٶȡ�
Table�惦�ı��^�cʸ��λ�Þ�10,30,50,70,90,110,130,150����8���c��ÿ��һ���c�|�l(f��)���^����HW_TIMER�ɾ��ʿ���ݔ���}�_�Č��ȣ�ݔ���l�ʸ��죬���w���ȸ��ߡ�
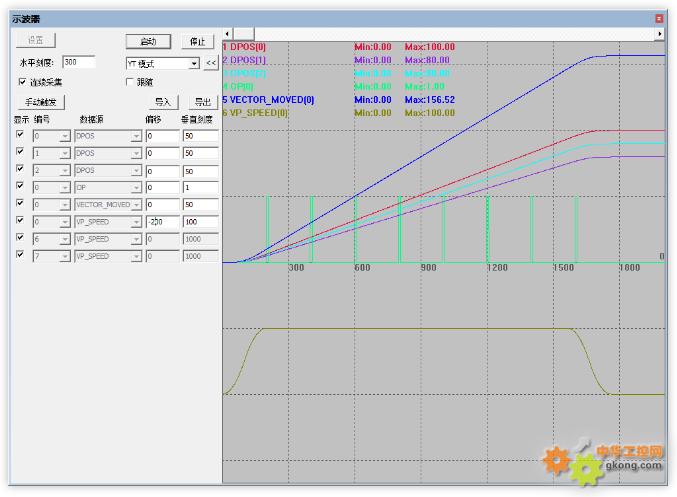
2.ҕ�l��ʾ
���Σ����\�Ӽ��g �\�ӿ����� PSOλ��ͬ��ݔ ��(��)���߾��ȵ��g����S���SPSOݔ�� �� �ͷ������@�
���ྫ�ʃ���Ո�Pע“ ���\��С���� ”����̖����Ҫ���P�_�l(f��)�h(hu��n)���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ��(chu��ng)���gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���a(ch��n)Ʒ���аl(f��)���LJ��Ҽ����¼��g��I(y��)�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă�(y��u)���˲ţ��ڈԳ�������(chu��ng)�µ�ͬ�r���e�O(li��n)�ϸ����У�f(xi��)ͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��l(f��)չ������I(y��)֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I(y��)����Ҫ�I(y��)���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y(t��ng)_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ�ȵȡ�
|

