|
���죬���\��С���ֽo��ҷ���һ�� �\�ӿ������S����������c���F��������Ҫ��B�������ṩ�Ļ���ģʽ�����������Ļ���ģʽ�҂�������ƪ�����v�⡣
01 �S����
һ�������f��
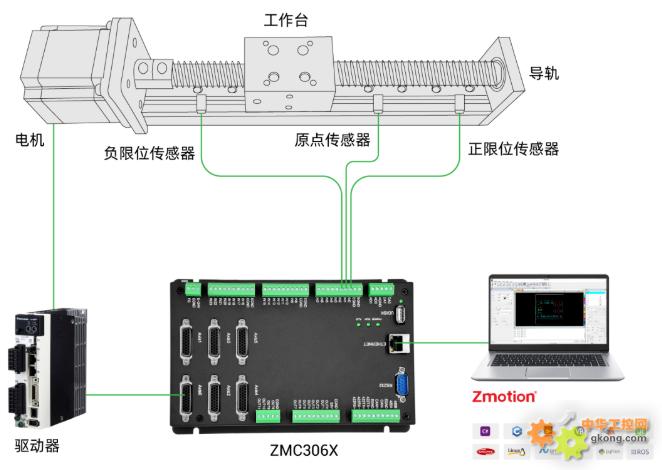
�ڸ߾����Ԅӻ��O���϶����Լ��ą�������ϵ���������\�ӿ��Զ��x��������ϵ�ϵ��\�ӣ�����ϵ��ԭ�c�����\�ӵ���ʼλ�ã����N�ӹ�����������ԭ�c�酢���cӋ��ġ�
���Ԇ��ӿ����������\��ָ��֮ǰ���O�䶼Ҫ�M�л���������ص��O���ą�������ϵԭ�c�������M�л�������������º��m�\��܉�E�e�`��
���\�ӿ������ṩ�˶�N���㷽ʽ��ͨ�^DATUM���S����ָ���O�ã���ͬģʽֵ�x��ͬ�Ļ��㷽ʽ�����S�����O�û���ķ�ʽ�Ԅӻ��㡣
DATUMָ�����S����ָ�ÿ��������һ���S�ϣ����S����r����Ҫ��ÿ���S��ʹ��DATUMָ����㡣
����r�C�_��Ҫ����ԭ�c�_�P��ָʾԭ�c��λ�õĵ�λ������������ؓ��λ�_�P��������������������z�y����̖��ʾ��ݔ����̖�����o������̎������
���S��ԭ�c�r��ԭ�c�_�Pͨ�^DATUM_IN�O�ã���ؓ��λ�_�P�քeͨ�^FWD_IN��REV_IN�O�á���������/ؓ��λ��̖��Ч������ֹͣ�S��ֹͣ�p�ٶȞ�FASTDEC��
�O����㷽ʽ�п�����������ŷ��������㡣
�����������ǰ����cλ�Â������B�ӵ��\�ӿ������ϣ�������ͨ�^�������c������λ�û����c��������Ҫ��B�������ṩ�Ļ���ģʽ��
�ŷ����������nj����c�������B�ӵ��ŷ������ϣ�������ͨ�^�l������o�ŷ��������ŷ������M�л���IJ��������������Ļ���ģʽՈ������ƪ��
�����������Pָ��
�\�ӿ��������㳣�õ����Pָ�����±���ʾ��

1.����ָ��DATUM
DATUM���\�ӿ������Ļ���ָ����P��������ģʽ �ܶ࣬������ǰ�S��̎��λ�û�Ч��Ҫ���x����m��ģʽ��DATUMָ��ָ����S�_ʼ�\�ӣ��ь�ԭ�c��̖������ԭ�c��̖������ֹͣ������ǰ��λ�����㣬����ɹ���Ԕ�酢Ҋ�¹��f����
�Z���� DATUM(ģʽ)
2.ӳ��ԭ�cݔ��DATUM_IN
�\�ӿ�����ԭ�c�_�P���O�ã�����ݔ���IN��̖��
�Z���� DATUM_IN = ݔ��ھ�̖��-1ȡ��ӳ��
����ZMCϵ�еĿ����������� ݔ��OFF�r�J������̖ݔ�� (ECIϵ�п������c֮�෴)��ԭ�c����ؓ��λ�_�P��������̖ӳ�������Ҫ INVERT_IN ���Dݔ����̖��
3.�����ٶ�SPEED��CREEP
�����\���О��˸����_���ҵ����c����ʹ�������ٶ�CREEP���S�\���ٶ�SPEED���M��ԭ�c�ь���SPEED�O��������һЩ�����ڿ����ь�ԭ�c�_�P��λ�ã�CREEPһ����^Сֵ�����е�ԭ�c�_�Pֹ̎ͣ������ɹ���
�Z���� SPEED = ��ֵ
�Z���� CREEP = ��ֵ
4.��ؓ��λFWD_IN��REV_IN

Ӳ��λ�_�P�������S�����“���S���M����”����λ�_�P��Ӳ��λ�_�P�������_�PԪ����Ӳ��λ�_�P��ָ��ӳ�䵽����ݔ���_�P��̖�ϣ������_�P��̖�dz��_߀�dz��]�_���Ƿ�Ҫ����̖�M�з��D���O����ɺ�����Ӳ��λ�_�P�������S����ֹͣ�\�ӣ�ֹͣ�p�ٶȞ�FASTDEC��
ܛ��λ�_�P�������S��“��������”����ָ��ֱ���O����λλ�ã��S�ߵ��O��λ�ú��������Üp�ٶ�FASTDECֹͣ�\�ӣ�������λ�ڙC���������M���������PӲ��λ�_�P�ăȂȡ�����ܛ��λ�_�P��λ���^���`���˿ɸ�����ǰ���\��܉�E�;��wҪ���{���S�Ĺ���������
�����_������λ�_�P����Ҏ��λ�ó�Խܛ��λ�r���\�ӿ������o��ֹͣ�����_���\�ӡ���λ�|�l�Ժ��S�o���^�m�\�ӣ��˕r��Ҫ�{���S��λ�ã�ʹ���h�x��λλ�ò��������_ʼ�\�ӡ�
�S��������λ�ĕr��ŕ��a��ֹͣ��̖���˕r���ڜp����Ҫһ���ĕr�g�����H�S��λ�Õ�Խ�^��λһ�����x�����Oֹͣ�rSPEED�ٶ���v 0 ����p��FASTDEC��a��Ӌ�㹫ʽ��
�� v t �� 2 - �� v 0 �� 2 =2as
�����·�������0-100 2 =2*(-1000)*s���ó��p�ٵľ��xs=5���ɴ˿ɵã�����FASTDEC�͜pСSPEED�����_���pС�p�پ��x��Ŀ�ģ��Է�ֹ�^�_��
�Z����
FWD_IN = ݔ��ھ�̖��-1ȡ��ӳ��
REV_IN = ݔ��ھ�̖��-1ȡ��ӳ��
5.���㷴���ӕrHOMEWAIT
���}�_��ʽ���ŷ����������ֻ���ģʽ����ԭ�c��̖֮��ֹͣ��������ԭ�cSPEED�ٶ��^��a���^�_��ֹ֮ͣ�����ӕr֮����CREEP�ٶȷ�����ԭ�c��������Ĭ�Jֵ���ӕr2ms����Ҫ�\�и�ƽ���Ĉ��Ͽ��m�����ӷ����ӕr��
�Z���� HOMEWAIT=��ֵ�������λ��
6.�S��BAXISSTATUS
�鿴�S��ǰ�Ġ�B�����Բ�ԃ�������Ƿ�̎�ڻ����B��������λ�_�P��ܛ����λ�����a������ʾ��
AXISSTATUS��ֵ�������f�����£�ͬ�r�l����N�e�`���ýM��ֵ��ʾ��

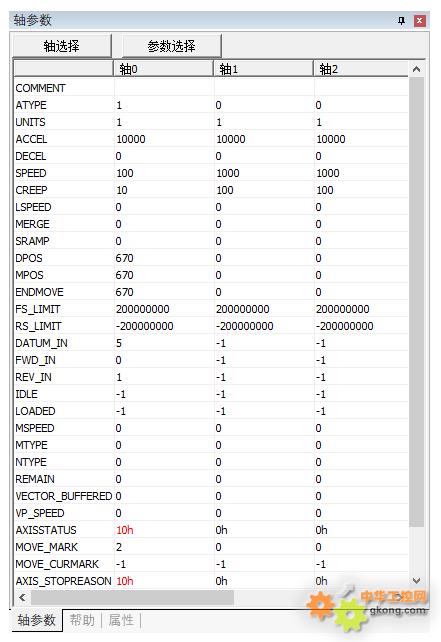
��ӡ��Ϣ���£� ��ʾ���S0�����^��������������λ�_�P��ֹͣ�S�\�ӣ�����ӡ�S��B����ʾ��������Ԍ��S�����\�ӣ��x�_��λ�_�P���ɡ�
Axis: 0 AXISSTATUS:50h,FWD
���D����ͨ�^�S��B���ڌ��r�ıO��AXISSTATUS��
��������ģʽԔ��
�Z���� DATUM(ģʽ)
����ģʽ+10��10+n����ʾ������λ���ң�����������λֹͣ������DATUM(13) = DATUM(3+10)��ʹ��DATUM(13)�Ļ��㷽ʽ����������λ��ֹͣ�����Ƿ����\�У�������ԭ�c�������g����r��
����ģʽ+100��ģʽ100+n��110+n�քe����n��10+n���� ��ʾ����ɹ�֮���Ԅ�����MPOS������DATUM(103)��DATUM(113)���m����ATYPE=4�����뾎�a��������Ԅ�����MPOS(�H��4ϵ��) ��������ģʽ�Ԅ�����DPOS��MPOS��Ҫ�ք����㡣
02 ����������ģʽ
�������ϱ�����A�ĎNģʽչ�_Ԕ���v�⡣
�v�SV���\���ٶȣ��M�SS�������\����ʼ�c�ľ��x��
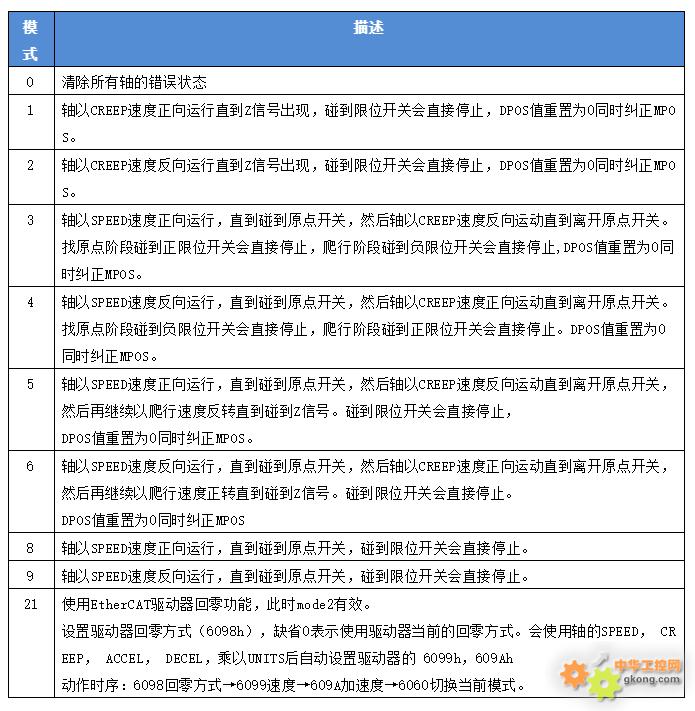
1. ����ģʽ1
DATUM(1)�S��CREEP�ٶ������\�У�ֱ��Z��̖���F���_ʼ�p�٣�ֹͣ����̎λ�Þ����c���˕r��DPOSֵ���Þ�0������;����������λ�_�P��ֱ��ֹͣ��
����ģʽ2�cģʽ1��ԭ�c�\�ӷ����෴��

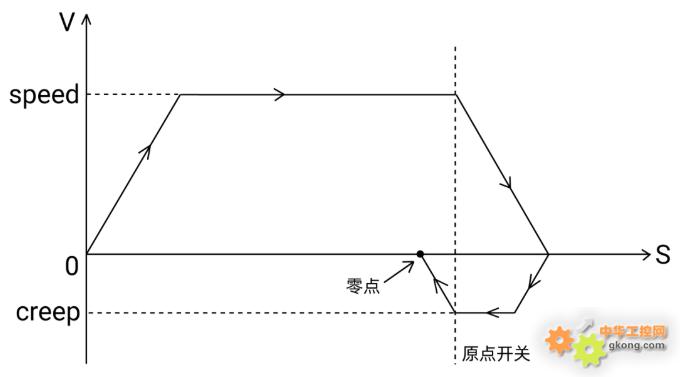
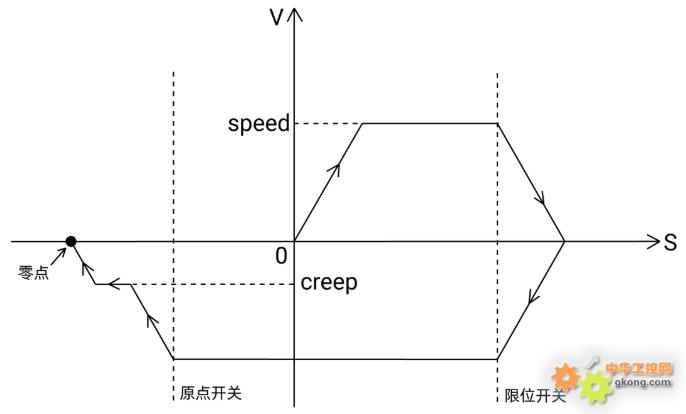
2. ����ģʽ3
DATUM(3)�S��SPEED�ٶȿ��������\�У�ֱ������ԭ�c�_�P���_ʼ�p�٣��p�ٵ�0֮���ٷ�����CREEP�ٶ���ԭ�c���ٴ�����ԭ�c֮��p��ֹͣ���Sֹ֮ͣ��DPOSֵ���Þ�0����ǰ��̎λ�Þ����c������;����������λ�_�P��ֱ��ֹͣ��
����ģʽ4�cģʽ3��ԭ�c�\�ӷ����෴��
3.����ģʽ5
DATUM(5)�S��SPEED�ٶȿ��������\�У�ֱ������ԭ�c�_�P���_ʼ�p�٣��p�ٵ�0֮���ٷ�����CREEP�ٶ��\�ӣ�ֱ��Z��̖���F֮��p��ֹͣ������Z��̖�����p��ֹͣ��ֹͣ��λ�Þ����c����DPOSֵ���Þ�0������;����������λ�_�P��ֱ��ֹͣ��
����ģʽ6�cģʽ5��ԭ�c�\�ӷ����෴��

4.����ģʽ8
DATUM(8)�S��SPEED�ٶȿ��������\�У�ֱ������ԭ�c�_�P���_ʼ�p�٣��p�ٵ�0֮��㌢DPOSֵ���Þ�0��ֹͣ����̎λ�Þ����c������;����������λ�_�P��ֱ��ֹͣ��
����ģʽ9�cģʽ8��ԭ�c�\�ӷ����෴��

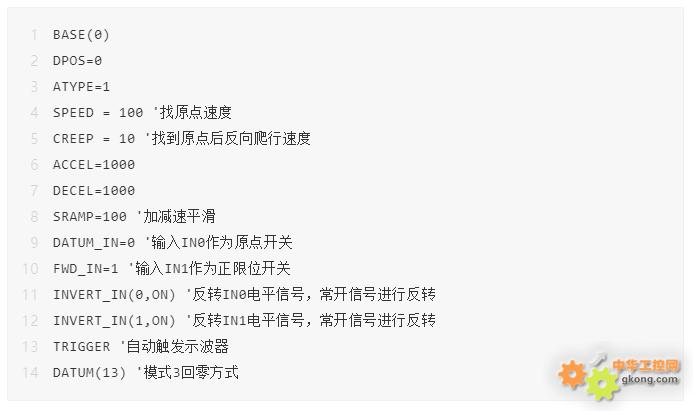
5.����ģʽ13
DATUM(13)�S��SPEED�ٶȿ��������\��,����������λ�_�P��������ֹͣ����SPEED�ٶȷ�����ԭ�c������ԭ�c��̖��p�ٞ�CREEPֱ���x�_ԭ�c�_�P����ֹͣ������ɹ���λ�����㣻��������ԭ�c��̖���t�cģʽ3��ͬ��
����ģʽ14�cģʽ13��ԭ�c�\�ӷ����෴��

03 ���������㷽ʽ
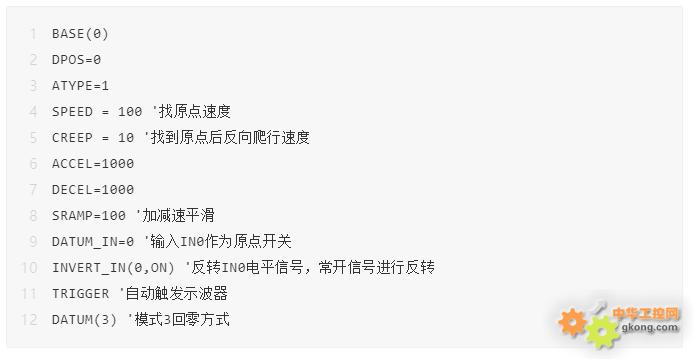
1.ģʽ3���S����ʾ����
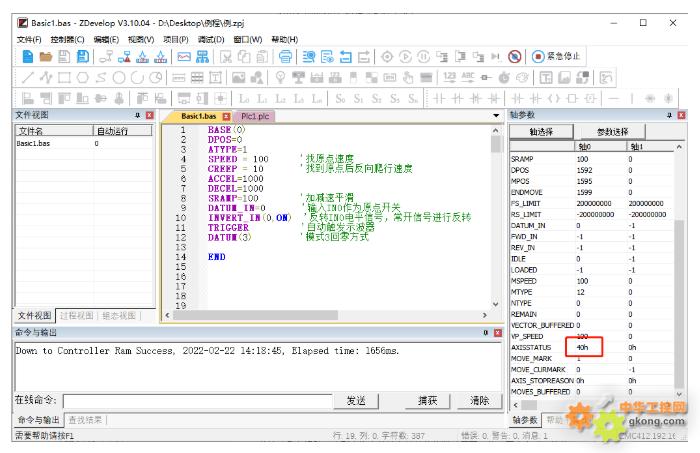
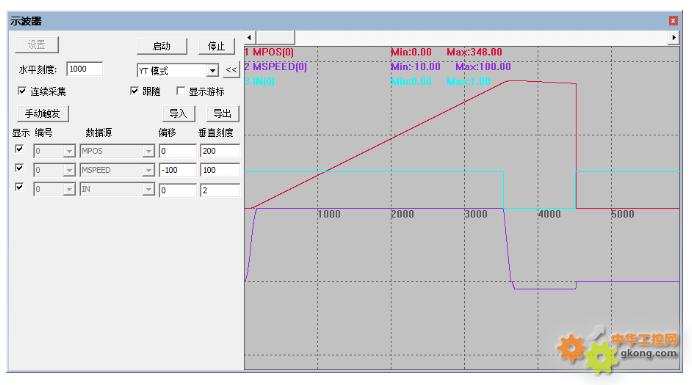
�\�������D��
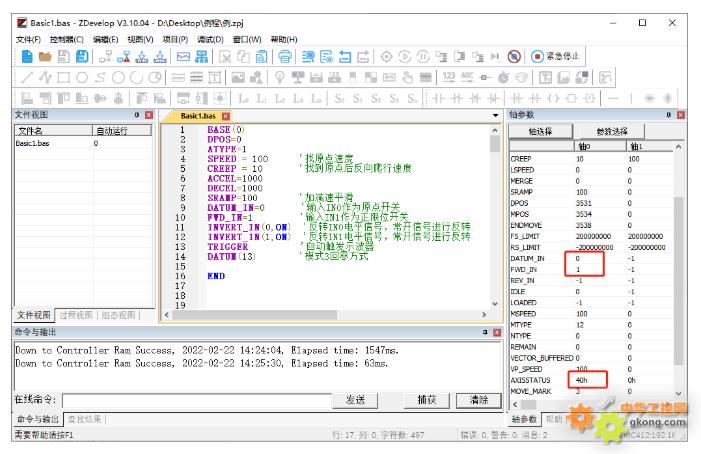
������ԭ�c�r�S��BAXISSTATUS�@ʾ40h������ɹ�׃��0h��
���D���S0��SPEED = 100���ٶ������\�У�ֱ������ԭ�c�_�P��̖IN(0)��Ȼ����CREEP = 10���ٶȷ����\�ӣ�ֱ���ٴ��x�_ԭ�c�_�P��λ�Õrͣ�£��˕r������ɣ��S��DPOS�Ԅ���0������;������λ�_�P���S����ֹͣ��
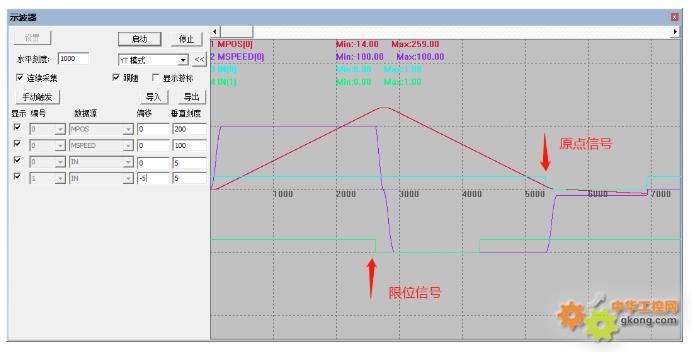
2.DATUM(13)ģʽ������DATUM(3)��������λ�_�P�S��ֹͣ�����Ƿ�����ԭ�c������ʾ����
�\�������D��
������ԭ�c�r�S��BAXISSTATUS�@ʾ40h������ɹ�׃��0h��ԭ�c�_�P����λ�_�P��ӳ��Ҳ�����S�������ڲ鿴��
���D���S0��SPEED = 100���ٶ������\�У�����������λ�_�PIN(1)���_ʼ������ԭ�c�_�P��̖��ֱ������ԭ�c�_�P��̖IN(0)��Ȼ����CREEP = 10���ٶȷ����\�ӣ�ֱ���ٴ��x�_ԭ�c�_�P��λ�Õrͣ�£��˕r������ɣ��S��DPOS�Ԅ���0��
�̌Wҕ�l��
���Σ����\�Ӽ��g�\�ӿ������S����������c���F���ͷ������@�
���ྫ�ʃ���Ո�Pע“���\��С����”����̖����Ҫ���P�_�l�h���c���̴��a��Ո��ԃ���\�Ӽ��g�N�۹��̎���400-089-8936��
���������\�Ӽ��gԭ�����gӭ����D�d����ͬ�W����һ������Ї���������ˮƽ�����°���w���\�Ӽ��g���У������D�dՈע������Դ
���\�Ӽ��g��ע���\�ӿ��Ƽ��g�о���ͨ���\�ӿ���ܛӲ���aƷ���аl���LJ��Ҽ����¼��g��I�����\�Ӽ��g�R���ˁ����A�顢���d�ȹ�˾�ă����˲ţ��ڈԳ��������µ�ͬ�r���e�O�ϸ����У�fͬ�\�ӿ��ƻ��A���g���о����LJ��ȹ����I��lչ������I֮һ��Ҳ�LJ������С����������\�ӿ��ƺ��ļ��g�͌��r����ܛ��ƽ�_���g����I����Ҫ�I���У��\�ӿ��ƿ�_�\�ӿ�����_EtherCAT�\�ӿ��ƿ�_EtherCAT������_�\�ӿ���ϵ�y_ҕ�X������__�\�ӿ���PLC_�\�ӿ���_�C���˿�����_ҕ�X��λ�ȵȡ�
|

