|
����
���� EtherCATϵ�н����ŷ��������ø��ٔ�����̖̎������DSP��������ƺ��ġ���������IGBTģ�K��IPM�����鹦��ݔ����������Ч�ʸߡ��w�eС�����o�������Ƶȃ��c����ƥ��512����2500����12λ��17λ��20λ�ȶ�N4���Ɔ�/��Ȧ�^��ֵ��W���a����
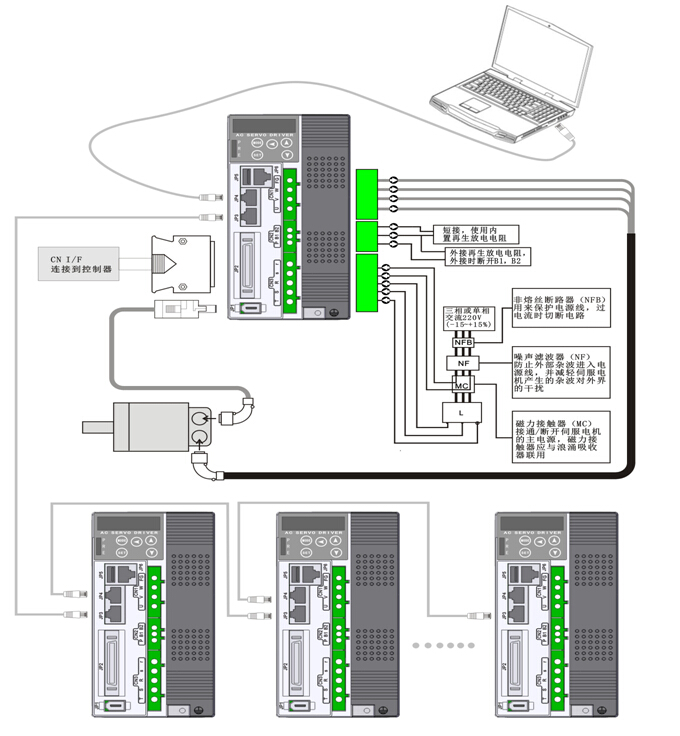
��������EtherCAT�W�j��һ�����ĸ������ŷ�����ϵ�y�ھW�j�������_����һ���µĸ߶ȡ�1000���ֲ�ʽI/O������ˢ�����ڃH��30μs�����а�������ѭ�h�r�g��ͨ�^һ����̫�W�������Խ��Q���_1486�ֹ����^�̔��������ஔ��12000��������I/O�����@һ�������Ă�ݔ�H��300μs������ EtherCAT ���g�ă������ܣ����Ԍ��F�Â��y�F������ϵ�y���o�����F�Ŀ��Ʒ������@�ӣ�ͨ�^����Ҳ�����γɳ����ٿ��ƻ�·��
������ϵ���ŷ������M��˜�EtherCAT�f�h��֧��CiA402Ҏ�����е�CoEģʽ��EtherCAT�ĸ������ģʽ��֧��������ͬ���\��ģʽ��������ͬ��λ��CSPģʽ��������ͬ���ٶ�ģʽCSVģʽ��������ͬ��Ť��CSTģʽ��֧�ֲַ�ʽ�r犹��ܣ����Ԍ��F�����ŷ����_ͬ����
��Ҫ���g����
- ���ƻ�·�ԴAC220V(-20%~20%)������·�ԴAC220V(-20%~+15%)��AC380V(-20%~+15%)
- �����^�d
- �m��늙C�~�����ʷ���50W~15KW
- ƥ����4���ƾ��a��
- ����12����ͨ���ָ��xݔ��ӿڣ�6��ݔ���ӿ�
- ����USB�S�oͨ��
- ����Ethernet�S�oͨ��
- ���Ϙ˜�EtherCAT�f�h
- ֧��CanOpen�f�h(CoE)����������ҎCiA402
- ֧�ֲַ�ʽ�r�
- ֧��������ͬ���\��ģʽCSP��CSV��CST
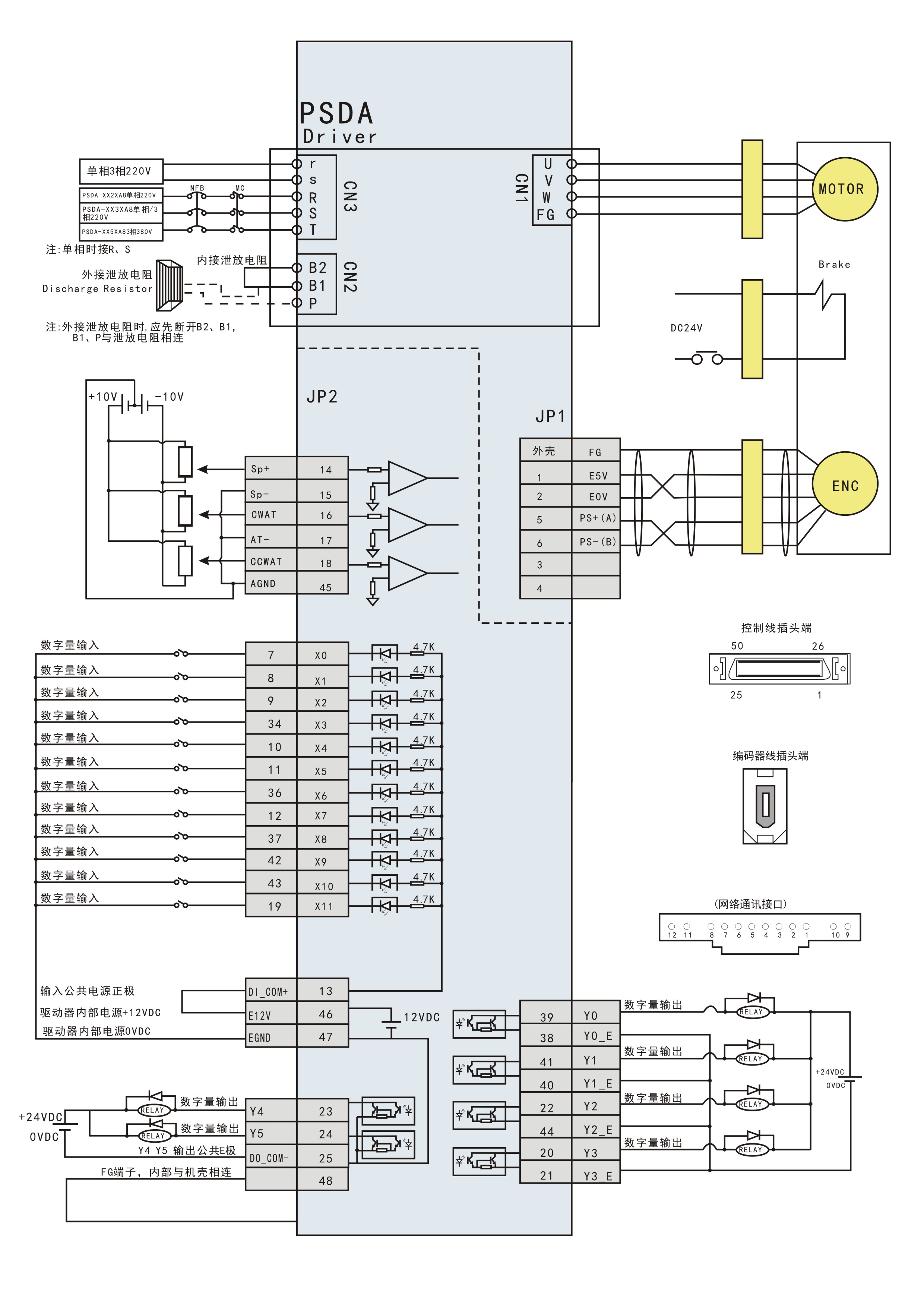
1�� �ľ��ƾ��a���Ӿ��D��JP1��
����
�����D1.1 늙C�˞����ϲ��^�������˞�1394���^
����
���� �D1.2늙C�˞麽�ղ��^�������˞�1394���^
2�� ������̖ݔ��/ݔ���Ӿ�����(JP2) ���x��
����������̖�Ӿ����ӣ�JP2���������̖ݔ��ݔ���ӿڣ���50PIN�߹ٽӿڡ�12��һ�㔵����ݔ�롢6��һ�㔵����ݔ����ԓ���ŷ����������ṩ12V��100mA��ֱ���Դ����������5%��
|
���Q���x
|
���_
|
�� �x
|
|
X0
|
7
|
ݔ��I/O X0��
|
|
X1
|
8
|
ݔ��I/O X1��
|
|
X2
|
9
|
ݔ��I/O X2��
|
|
X3
|
34
|
ݔ��I/O X3��
|
|
X4
|
10
|
ݔ��I/O X4��
|
|
X5
|
11
|
ݔ��I/O X5
|
|
X6
|
36
|
ݔ��I/O X6
|
|
X7
|
12
|
ݔ��I/O X7��
|
|
X8
|
37
|
ݔ��I/O X8����
|
|
X9
|
43
|
ݔ��I/O X9 ��
|
|
X10
|
42
|
ݔ��I/O X10��
|
|
X11
|
19
|
ݔ��I/O X11��
|
|
DI_COM+
|
13
|
ݔ����ӹ������O��
|
|
E12V
|
46
|
�Ȳ��ṩ����I/O�Ŀ����Դ+12V��
|
|
EGND
|
47
|
�Ȳ��ṩ����I/O�Ŀ����Դ0V��
|
|
Y0
|
39
|
Y0����λ���ݔ�����鼯늘O�_·ݔ����
|
|
Y0_E
|
38
|
Y0ݔ��ؓ�O��
|
|
Y1
|
41
|
Y1����ݔ�����鼯늘O�_·ݔ����
|
|
Y1_E
|
40
|
Y1ݔ��ؓ�O��
|
|
Y2
|
22
|
Y2���ŷ��ʂ��ݔ�����鼯늘O�_·ݔ����
|
|
Y2_E
|
44
|
Y2ݔ��ؓ�O��
|
|
Y3
|
20
|
Y3ݔ�����鼯늘O�_·ݔ����
|
|
Y3_E
|
21
|
Y3ݔ��ؓ�O��
|
|
Y4
|
23
|
Y4ݔ�����鼯늘O�_·ݔ����
|
|
Y5
|
24
|
Y5ݔ�����鼯늘O�_·ݔ����
|
|
DO_COM-
|
25
|
Y4��Y5ݔ�������ˡ�
|
|
Spd+
|
14
|
ģ�M�ٶ�ָ��ݔ��ˡ�
|
|
Spd-
|
15
|
ģ�M�ٶ�ָ��ݔ��ˣ���ַ�ʽ����
|
|
CCWAT
|
16
|
���Dģ�M�D��ָ��ݔ��ˡ�
|
|
CCWAT-��CWAT-
|
17
|
�D��ָ��ݔ��ؓ�O��
|
|
CWAT
|
18
|
���Dģ�M�D��ָ��ݔ��ˡ�
|
|
AGND
|
45
|
ģ�M�ء�
|
|
SM(�x��)
|
50
|
D/A�ٶȱOҕ��
|
|
IM(�x��)
|
49
|
D/A�D�رOҕ��
|
|
FG
|
48
|
FG���ӣ��Ȳ��c�C�����B��
|
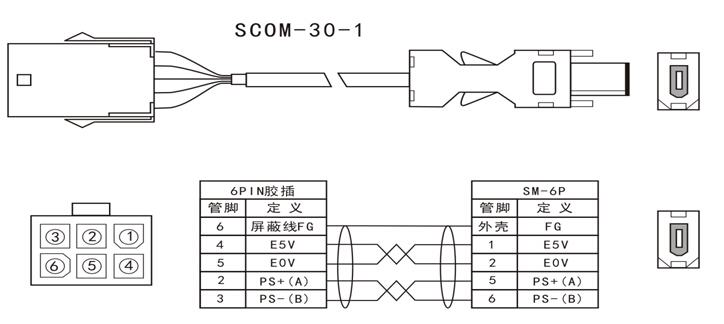
2.1�_�P����̖�Ӿ��D
��2.1.1 �_�P����̖ݔ��
���_�P����̖ݔ��X0~X11����D1.2��ʾ��
����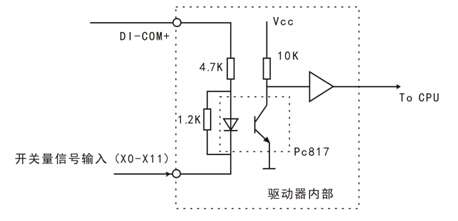
���� �D2.1�_�P����̖ݔ��ӿڈD
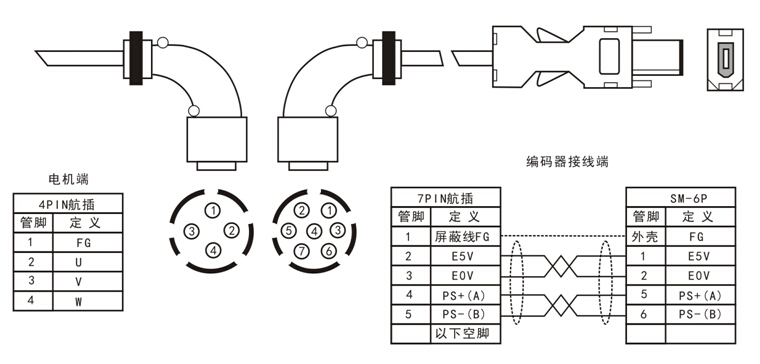
��2.1.2 �_�P����̖ݔ��
�������_�P����̖ݔ���ԭ��D��D1.3��ʾ��
���� 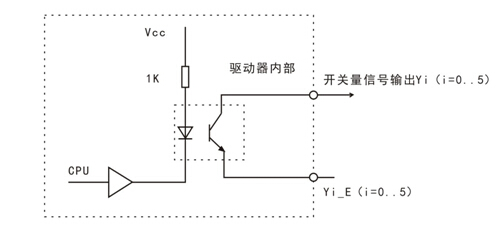
���� �D2.2�_�P����̖ݔ���ӿڈD
����ע�������Ӵ���30V/50mA�����ؓ�d����t�������pݔ���ӿڣ�
3��EtherCAT�W�j�ӿڣ�JP3��JP4��
���������B�����C����λ�C,���������x��һ���B�ӵ����C����������һ���B�ӵ���һ������������M�W;2���ӿڹ�����һ�ӵġ�
4��USBͨӍ�ڽӾ���JP5��
���� �Ӱ���õ��ǘ˜ʵ�USB�ӿڣ�ͨ�^ԓ�ӿڿ��Ԍ������M���{ԇ���O�ز��Ρ�PLC���̵ȡ�
5��EthernetͨӍ�ڽӾ���JP6��
���� �Ӱ���õ��ǘ˜ʵ�Ethernet�ӿڣ����r�ǂ��ù��ܡ�
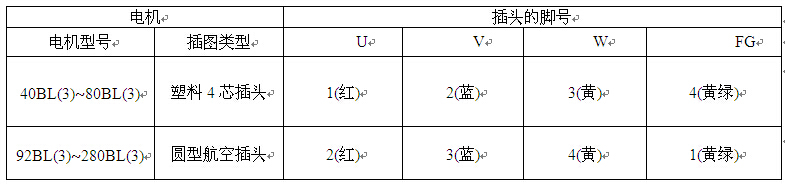
6��늙C�Ӿ���CN1��
��������늙C��ͬ����ͨ늙C����횰����_������Ӿ���늙C�������t���{���S�քe�����Ӱ��U��V��W��FG�������⚤�ӵ�̎��
7���Ƅ����Ӿ���CN2��
����CN2���Ƅ����ӿڣ�B1��B2�̽ӕr�Ƚ�й����衣���й�����r����Ҫ�Ȕ��_B1��B2�g�˽Ӿ����ٰ�B1��P�քe�cй��������B��
����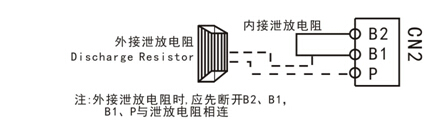
���� �D7.1�Ƅ����Ӿ��D
8���Ӱ��Դ�Ӿ���CN3��
����r��s����ƻ�·�Դ��늶ˣ���AC220V(-20%~20%)��R��S��T������·�Դ��늶��ӣ���Ҫ�������Hӆ؛��AC220V߀��AC380V�ŷ��M�������Ӿ���늉������քe��AC220V(-20%~+15%)��AC380V(-20%~+15%)�����dž���AC220V��늕r���t������R��S�����ϡ�
9�����μ����b�ߴ�
�����D1.6���D1.7�քe��04�ͣ���������100w~600w����10�ͣ���������750w~1500w��EtherCAT�ŷ��������μ����b�ߴ�D��
����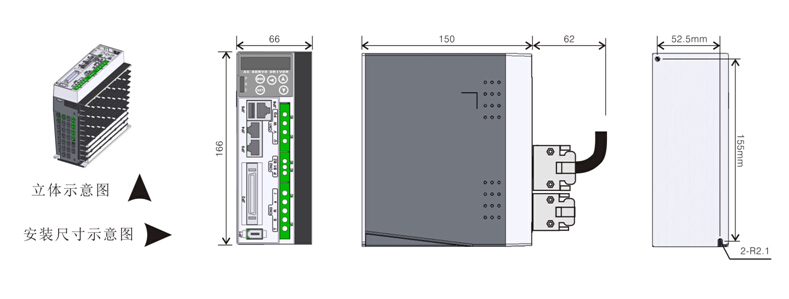
�����D9.1 04�ͣ�100w-600w��EtherCAT�ŷ��������μ����b�ߴ�D
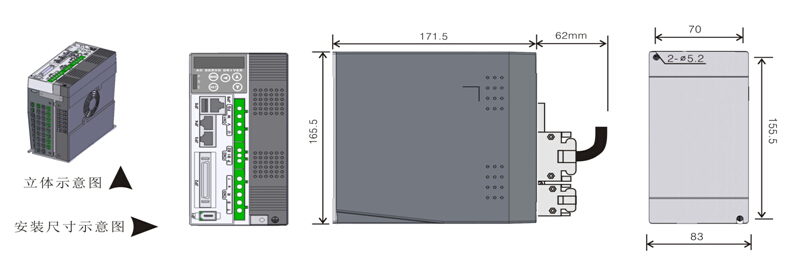
���� �D9.2 10�ͣ�750w-1500w��EtherCAT�ŷ��������μ����b�ߴ�D
10�����w늚�Ӿ��D
����
�D10.1���w�Ӿ�
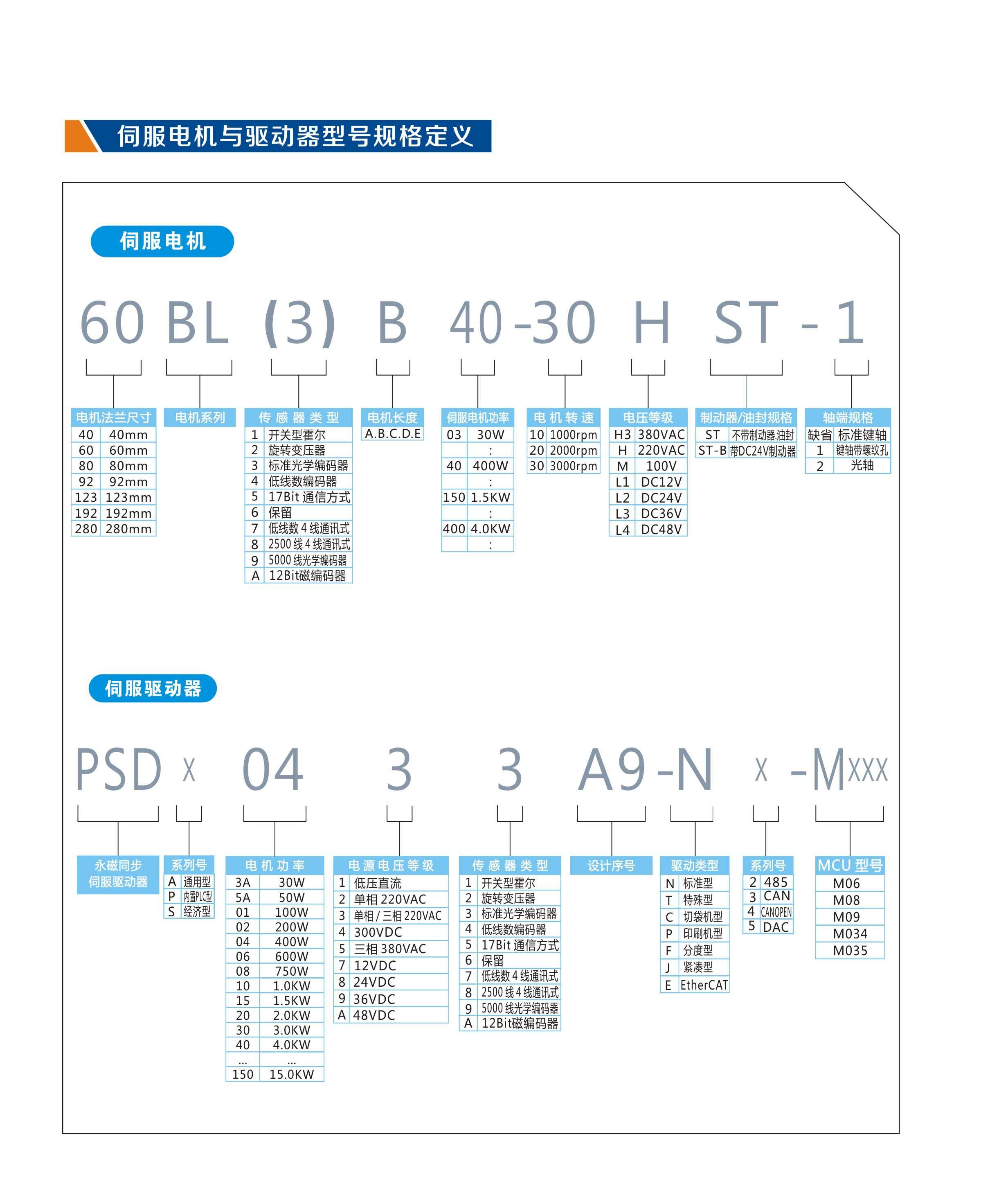
11���ŷ���̖�Ӿ�ʾ��D
�����D11.1�ŷ���̖�Ӿ�
����
����
|

