|
���ߣ����i �Ϲ��� ���� �����e
���������A���d�Ƽ�����˾������ 100192 ��
����
����y���O�佛�������ڏ���ӡ����������ۉm�࣬�ض�׃����Đ��ӭh���С���ˣ���Ȳ�����O���g�Ĕ���ͨ��Ҫ��ͨ�^����Ĺ��ϙz�y�����_���^�ߵĿɿ��ԡ������Ժ����e�������ڌ��r�Է��棬����ϵ�yһ�w������Ҫ�քe���l�әC��׃�����M�п��ƣ�����֮�g�Ĕ���ͨ��Ҫ��һ�l��Ϣ�����푑��r�gһ��O�̣��@�Ӳ��܌��F���l�әC��׃�����Č��r���ƣ��Ķ������������ϵ�y�ľC�����ܡ����⣬߀��һЩ������ͨ�ŵ�����Ҫ����f�h�����ԡ��̎���Ϣ��ݔ����Ϣ���Q���l���ԡ��W�jؓ�d�ķ����ԡ��߰�ȫ�Ժ��ԃr�ȸߵȡ�
��ˣ����������һ�N����PXI������1553B�����ĸ߾���ͬ���y�ؼ��g���ڌ��r����ϵ�y���F����ͨ���cģ�M��̖�l�͡��ɼ�ͬ�����ӣ�ͬ�r�ṩ��ij�̈́���ϵ�yһ�w���O��߿ɿ��Ժ͌��r�Ԝy�ؽ�Q������
1 ϵ�y���w����
���wϵ�y�M�ɽY�����D��ʾ
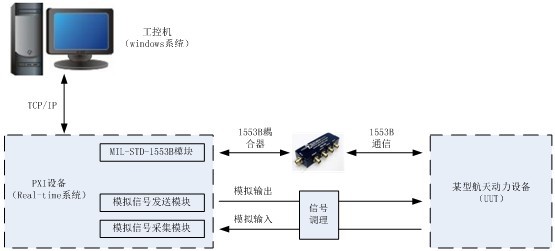 �D 1ϵ�y�Y��ʾ��D �D 1ϵ�y�Y��ʾ��D
ϵ�y����1553B����ͨ��ģ�K��PXI����ģ�M��̖ݔ��ݔ���yԇ�O�䣬����ij�̈́����O��Ŀ����c�����yԇ���о��Ԍ��yԇ�Ŀ��Ҫ������λ�z�y���O�ԙz�y��λ�����Ԝyԇ�����B���Ԝyԇ���l�����Ԝyԇ����헜yԇ����Ҫ1553B����ͨ���cģ�Mݔ��ݔ�����ͬ���_ʼ��ϵ�y�߂�ģ�M��̖�ӿں�1553B�����ӿڣ����� 1553B�����l������ָ����̖��������̖��ͬ�r�����b�y��̖�Լ��������̖��ͨ�^ģ�M��̖�y�M���l�Ϳ����{��ָ����̖��ͬ�r����λ�÷�����̖�Լ�����ģ�M��̖�����ҿ����M�Д������������ܜyԇ��
���wϵ�y����ģ�K��D�OӋ���D��ʾ��
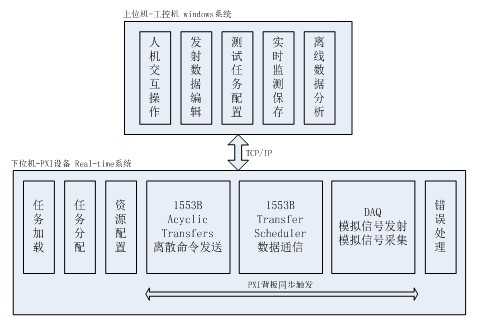
�D 2ϵ�y����ģ�K��D
ԓϵ�y�ĽY���Ͽɷ֞���λ�C����λ�C�ɲ��֣�
��1����λ�C�\����WINDOWSϵ�y�£���Ҫ���ܣ�
- �˙C����
- �yԇ헹���
- �����ļ���
- �����@ʾ������
- ���������O�y
- �x�������㷨������λ�����ԡ����B���ԡ��l�����ԣ�
��2����λ�C�����ڻ���PXI��Ӳ��ƽ�_�ϣ��\����Real-time����ϵ�y�£���Ҫ���ܣ�
- �yԇ헼��d
- �yԇ�΄շ���
- ����yԇ�YԴ����
- 1553Bģ�K��CANģ�K�xɢͨ��ָ���°l
- 1553Bģ�KӲ�����r�B�m����ͨ��
- 1553B����ͨ���cDAQģ�Kͬ���|�l
- �e�`̎���cӛ�
2 ϵ�y�P�I���g
2.1 1553B��������ģ�K�OӋ
2.1.1 Ӳ�����r�c�����o�p���d
1553BӲ�����r����ͨ�ţ�ͨ�^Transfer Schedulerģ�K�OӋ��ϵ�yMinor Frame Time��1ms����1msӲ�����r�r�g�ȣ����1553B������BC-RT�Լ�RT-BCͨ�š�Ӳ�����r�`��±1μs��

�D 3 Transfer Schedulerģ�K
����ͨ���^���У�Ӳ�����r1ms���һ��1553B�����Ĕ������f����ô�ʴ_��Ч�ļ��d�l�䔵���Ȟ��P�I��ϵ�y�OӋ����Ȟ�256��Buffer���g����С��32*256������ʼ���r���M���Ӕ����� Message�_ʼӋ����������Buffer����0����Buffer����16*256��λ�Ì���32*128����������˷����ГQ����ֱ������ȫ���l����ɣ��Ķ����F��1553B�����o�p���d������������㷨���D��ʾ��
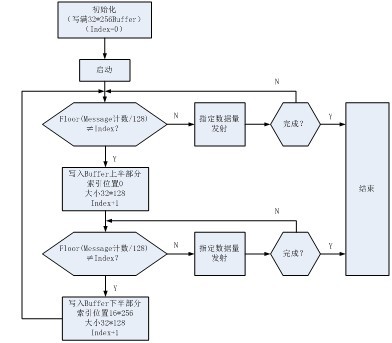
�D 4�����o�p���d�㷨���̈D
2.1.2 ͬ���|�lDAQ�����ɼ�ģ�K
ͨ�^Acyclic Transfersģ�K�OӋ��Strobe�|�l����ͨ�^PXI���������PXI_Trigger�ӿڌ��|�l��̖·����DAQģ�K�|�lԴ�ӿڣ�����“DAQ�_ʼ�|�l”���ã����F��1553B����ͨ�Ŕ����cDAQ�����l��/�ɼ�ͬ���M�еĹ��ܣ�ͬ������±80μs��

�D 5 Strobe�|�l��
���D��ʾ������1553B�Į��������l��1553B Start trigger��PXI����PXI_Trigger���|�lģ�M��̖�l�͡��P��80μs���t������̖�ГQ��·�ɕr�g�Լ�ģ�M��̖ģ�KD/A�D�Q���ʵȶ������Ӱ푣�����ͨ�^���õ�ģ�M��̖ͬ��ģ�K�Mһ������ϵ�y���w��ͬ�����ȡ�
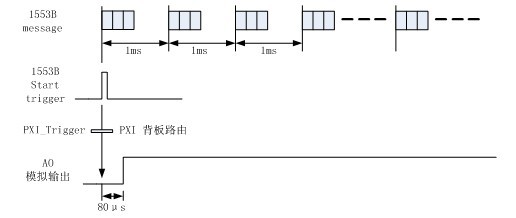
�D 6 1553B�|�lͬ���_ʼ
2.2 Real-Time����ϵ�y�������_�OӋ
���˱���ͬһ�������ļ��xȡ��Σ�����Real-Time ����ϵ�y�ȴ桢CPU ʹ�����Լ�Ӳ���������OӋ��PingPangFIFO�������_�C�ƣ��䌍�Fԭ�����D��ʾ��
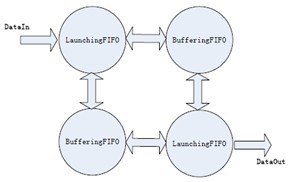
�D 7 PingPangFIFO�������_�C��
ÿ���ļ������x�뵽LaunchingFIFO �к����R���BufferingFIFO Ҳ�����ͬ�ӵĔ����� �ɴ˃ɂ�FIFO ͨ�^PingPang ���_�ęC�ƣ�ѭ�h����ݔ��һ���������ļ�������Ӳ���l��忨��DA���M�Д����l�䣬���F��ͬһ�������ļ����rѭ�h��ΰl�䣬�����ط��͈����ļ�IO �IJ�������Ч�����ϵ�y�Ŀɿ��ԣ����L��Ӳ�Pʹ�É�����������CPU ʹ���ʡ�
ԓ���g��������ÿ���l���ļ�ֻ��Ҫ�xȡһ�μ��ɣ�ֻҪ�ȴ����S����������ϰ��ה�����С�İl�䣻���ⷴ���M��Ӳ�����ò��������C�˶�η��Ͱl��֮�g�����͕r�g�ϵć����B�m��
2.3 ϵ�y���e̎���c���ϻ֏��OӋ
���]�����wϵ�y�ĸ߿ɿ���Ҫ����Real-Time����ϵ�y���OӋ��ϵ�y���e̎���c���ϻ֏͙C�ơ�����ϵ�y���e��͵IJ�ͬ���O�����������e�ȼ�����ϵ�y��ij�KPXI�忨�ӈ��e���tϵ�y������ԓ���̣�֮�����ð忨�@ȡ�����ķ�����Ϣ�����������e̎�����Ϊ��O������������ӛ䛣��Ա��ں��ڙz�;S�o�� ������ϵ�yܛ���P�I���������ӿ��T�����Á��O�غ��ľ��̌��r��r���ڱ�Ҫ�r���ӿ��T�������°忨��ϵ�y���֏ͳ�ʼ��B���Ķ��ڲ�Ӱ�ϵ�y������r�¸���ϵ�y�r�g�ԄӼ��d�µ��΄գ�ʹ�ò����ˆT���،��r�O���c�S�oϵ�y��������O�����ܻ��̶ȡ�
3 �yԇ�Y���c����
���^��η��͜yԇ�����D��Ҋԓϵ�y�����ͨ�Ŏ��r�g1msӲ�����r���`��±1μs��
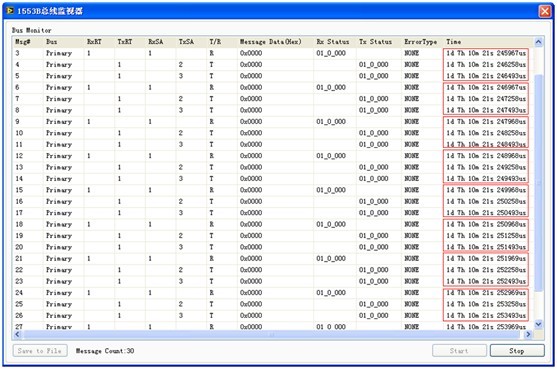
�D 8 �����Oҕ��
1553B����Strobe�|�l�������F��1553B����ͨ���cDAQģ�M�����l�䡢�ɼ�ͬ���_ʼ��ͬ���`��80μs������ͨ�^���õ�ģ�M��̖ͬ��ģ�K�Mһ������ϵ�y���w��ͬ�����ȡ��yԇ�Y�����D��ʾ��
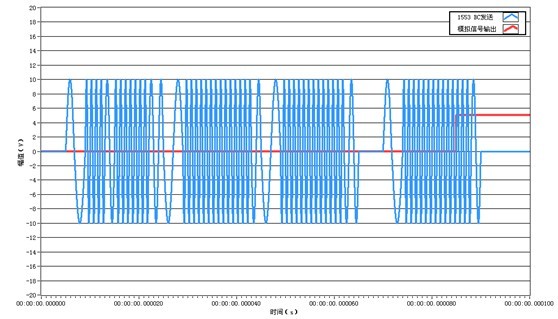
�D 9 ͬ����̖��������
4 �YՓ
�C����������������Ļ���PXI������1553B�����Ĝy�ؼ��g��1553B����������/푑��ąf�h��ʽ���C�ˌ��r�Ŀɴ_���ԣ��������ؓ�Y��ʹ��1553B�����ɞ�ֲ�ʽ�O��������B�ӷ�ʽ��ԓϵ�y�����ͨ�Ŏ��r�g1msӲ�����r���`��±1μs��ͬ�rͨ�^1553B����Strobe�|�l�������F��1553B����ͨ���cDAQģ�M�����l�䡢�ɼ�ͬ���_ʼ��ͬ���`����ؓ80μs��ͬ�r���rϵ�y�������_���g�����ϵ�yʹ��Ч�ʣ������˃ȴ��cCPU�����ģ��OӋ��ϵ�y���e�c���ϻ֏ͣ����Cϵ�y�L���\�еķ����ԣ����������ϵ�y�Ŀɿ��ԣ������ڲ������Uչ��Ŀǰԓϵ�y�O����Ͷ�댍�Hʹ���У��\�����á�
|

