|
PCI5565 PCI-5565 PMC5565 VMIC5565 ����ȴ� ����ȴ濨 GE����ȴ�
1����
�댍��������u�r��Ş�������ɔ_���ܵ�һ�N��Ч���g�ֶΣ��ڌ�������ϵ�y����Ч���u���������^����ռ����Ҫ��λ���ڌ����댍������У����r�����ɼ�ϵ�y�l�]����Ҫ���ã�һ���棬�ڷ����\���^������Ҫ���r�ɼ������^���������O���ݔ���������ڽ��㏗��ģ�ͣ����F�]�h������һ���棬�ڌ��Y�������^���У���Ҫ�S����Ԕ���Č���^�̔�������֧�Σ��Ա��C���YՓ�Ĝʴ_���ɿ����b�ڌ����댍����攵���ɼ��Č��H������Ҫ�C�Ͽ��]�wϵ�Y����ܛӲ���M�ɼ����g���F�����ȶ�����������أ��OӋ���r�����ɼ�ϵ�y�ԝM�㔵���ɼ��Ĝʴ_�ԡ����r�Ժ��`����Ҫ����������ʽ���_�ƌ���Ş�����댍�����ϵ�y�鑪�ñ��������������ɼ��΄����c��ͨ�^ܛӲ���wϵ�Y���OӋ�͌��r�ԃ����OӋ�����F�������Č��r�ɼ����ԝM�㷴Ş�����댍�����Ĕ����ɼ�����
2���r�����ɼ��΄շ���
2��1�����ɼ��ă���
��Ş�����댍�����ϵ�y���÷ֲ�ʽ�wϵ�Y��������ͨ�žW�j����ԇ���_�����^�����S�w���D�_�����l�h��ģ�M���ͷ������C���B������ͨ��Ӌ��C��ͨ�ò���ϵ�y���F�����]�h���棬ϵ�y�M�ɽY��Ҋ�D1���ڰ댍������У�������Ϣ�ā�Դ��ͬ���Ɍ����ɼ�����Ϣ�֞������l2I������ԇ���_�����^������B��Ϣ��Ŀ�˙z�y��Ϣ�����S�w���D�_��λ�÷�����Ϣ�����l�h��ģ�M��Ŀ����̖���ɔ_��̖������Ϣ��ģ�ͽ������Ï�����������Ϣ���Լ�����^�̠�B��Ϣ����Ҋ����ϵ�y�IJɼ��������Ё�Դ��ɢ����ʽ���ӡ����r��Ҫ��ߡ�ӛ䛃��ݶ�׃�����c��
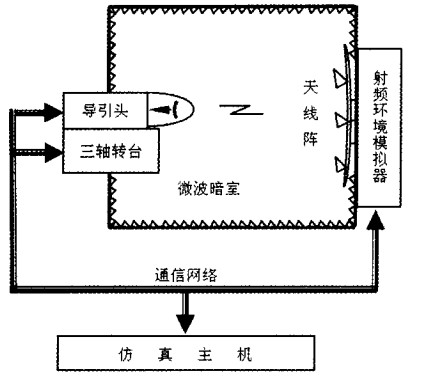
�D1��Ş�����댍�����ϵ�y�Y���D
2��2�����ɼ����r�Է���
�����Č��r�ɼ���̎���ͽ������nj��F�]�h���挍�ı�Ҫǰ�ᡣ���ڷ���ϵ�y�����ڌ���(�����^)�����룬Ҫ���������M��ԓ�c���r���ⲿ�¼����m��…����ˣ������IJɼ��c̎�푪ԓ�ڷ���ģ�ͽ���Ҫ��ĕr�ރ���ɣ��Ķ��������ɼ�ϵ�y�Č��r������˺ܸߵ�Ҫ���ڷ����\���^���У�����ϵ�y��ÿһ�������ڃ���Ҫ��ɔ����IJɼ���̎���������ͱ���ȹ��������ǿɌ������\�Ў����ڴ����֞��������֣���D2��ʾ��
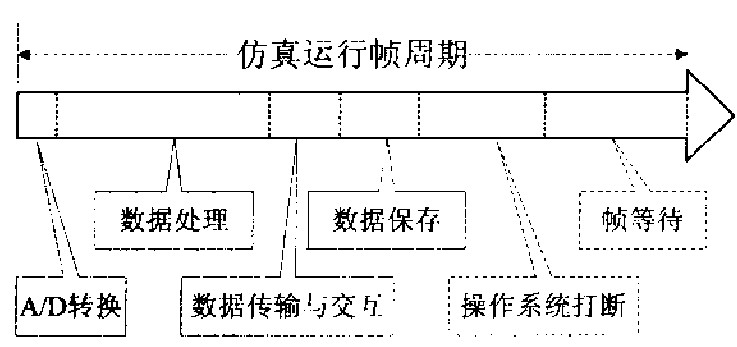
�D2�����\�Ў����ڽM�ɈD
�ڈD2��ʾ�Ď������У���Ч�������ݰ�������A��D�D�Q����ĵĔ����ɼ������c�Ĕ���̎����������ݔ�c��������������ȡ����ϵ�y���÷nj��r����ϵ�y��������΄��{�ȼ��YԴ��������،����M�̒����γɲ���ϵ�y����r�g�����ˏ��a����ϵ�y����r�g�Ȳ��_���ԣ��Y��ϵ�y���r������һ���O�Î������Դ�����Ч�����r�g���γɎ��ȴ��r�g���댍������еČ��r�Ԇ��}�����ԏĿ����ԡ������Ժ�ͬ�������������M�п��]��
1)�ڿ����Է��棬�����IJɼ��͂�ݔ���ֿ�ͨ�^������Ӳ�����A��D�D�QЧ�ʣ��p�ٔ�����ݔ�r�g���ڔ������沿�֣����˔�����һ��ĕr�^�࣬��Ҫ��ܛ���OӋ�c���F���M�Ѓ����OӋ����ߔ�������Ч�ʡ�
2)�����ɼ��r�g�ķ����ԣ���Ҫ��ָ�����ɼ�����ݔ�ʹ惦�^�����Õr�g�ķ����ԡ��ڱ�ϵ�y�У����ڲ���ͨ��Ӌ��Cƽ�_�ͷnj��r����ϵ�y(WindowsNT)����Ȼ��������ϵ�y������}��Ӱ푔����ɼ��r�g�ķ����ԡ�
3)�����ɼ���ͬ���ԣ���ָ�����湝�c���ɼ������ڕr�g�ϵ�һ���ԡ������댍����挍���ù̶������ڿ��ƣ��锵���ɼ���ͬ�����ṩ�ˌ��F���A��ᘌ�ϵ�y�ֲ�ʽ�Y���������ֽ┵���ɼ��΄գ�����ͨ�^�����ڃȲ��ĕr�gƬ���ֿ��Ԍ��F�r�gͬ���Ĕ����ɼ���
3ϵ�y�wϵ�Y���OӋ
3��1ϵ�y�wϵ�Y��
�����댍����水�����r��Ʉ��֞錍�ʂ䡢�����\�к͌���Y�����������A�Σ��ڌ��ʂ�͌���Y�������ɂ��A�Σ�Ҫ��������ʽ�`������r��Ҫ���^�ͣ��ڷ����\���A�Σ������������ݿ����ȴ_��������Ҫ������ϵ�y�����������M�У������r��Ҫ������b�ڴˣ����r�����ɼ�ϵ�y��ͨ�žW�j������̫�W�͌��r�W����̫�W���ڌ��ʂ�͌���Y�������ɂ��nj��r�����A�Σ��M�㔵����ݔ�`��������r�W���ڷ����\���A�Σ��M�㔵����ݔ�ď����rҪ��ϵ�y����Ӳ����Ҫ������������������������ɼ���λ�C��I��O�ӿ���ϵ�y�����У�������������錍���惦��������ƽ�_�������ɼ���λ�Cͨ�^I��O�ӿ���ϵ�y�c�����^�M����Ϣ�Č��r������ϵ�yӲ���M����D3��ʾ��
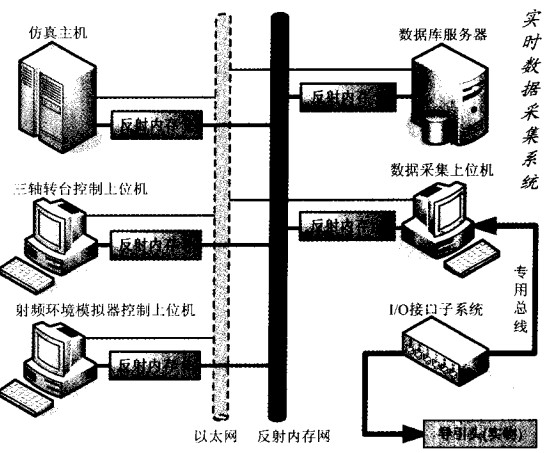
�D3�ɼ�ϵ�yӲ���M��ʾ��D
3��2Ӳ���x��
��M��ϵ�y�����ɼ��ʴ_�Ժ͌��r��ָ��Ҫ���xȡϵ�y��ҪӲ���������£�
1)������������͔����ɼ���λ�C�����ù��ؙC����CPU��PDһ3��2G���ȴ��DDR2—1G����160GӲ�P�惦�������ù��ؙC������\������������Ч�s�̔���̎��r�g��ߔ����ɼ��Ŀ����ԡ�
2)I��O�ӿ���ϵ�y����32·D��A��32·A��D���ٽӿ��M��ģ�M��̎����32·DI��32·DO���ٽӿ��M���_�P��̎����8·���нӿ��M�Д�������ݔ�����У�ģ�M���ɼ�ͨ�^
l2λ��ADS7805��ɣ���A��D�D�Q�r�g�����^lO�룬���F�ˌ������Ŀ��ٲɼ���
3)���r�W������VMIC��˾���a��5565ϵ�з���ȴ濨�M�ɡ�����ԓ����ȴ濨���Ϲ��w��ݔ���|���Ɍ��F174M�ֹ�����Ĕ�����ݔ���ʣ�ͬ�r���C�W�j��ݔ���t�����^400�{�룬ʹ�þW�j��ݔ�r�g��Ҫȡ�Q�ڹ���ȴ��x���r�g�����C�˔�����ݔ�Ŀ����ԡ�
4�����ɼ������OӋ
�ڱ�ϵ�y�У������O��ķֲ�ʽ�����Q���˔����ɼ��΄յķֲ����F�������ĕr�gһ���ԡ�����ʹ�õď��s����Ҫ���С��yһ�ľC�ϔ�����������ˣ�ϵ�yܛ���Y�����OӋ�ϳʬF�ֲ��ɼ��c���й�����Y�ϵ����������ڔ����ɼ�ϵ�y�Ĕ���Դ��ɢ�������Ɍ������ɼ��΄շֽ������湝�c�Ĕ����ɼ��͔�����������Ĕ����惦�ɂ����֣��ɼ�����ͨ�^����ȴ�W�j�����������M�д惦���鱣�C�����ɼ��Č��r�ԣ���������Ҫ�M�����������OӋ��
1)���÷���ȴ�W�j�Д��C�ƌ��F���_�Ď�ͬ����
VMIC����ȴ濨֧�ֶ����Д��¼��������Д��¼����Ԍ��F���ٵĹ��cͨ�ţ����M�����湝�c��������ͬ���\�У���Ч���C�ɼ������ĕr��һ���ԡ�
2)ͨ�^�r�gƬ���ֱ����x���_ͻ�����ڷ���ȴ�C�Ƶ������ԣ���ͬ���湝�c�п���ͬ�r��ͬһ��ַ�M�в������l���x���_ͻ�����˱����x���_ͻ���}���ڽyһ�����ڵĻ��A���M�Еr�gƬ���֣���ͬһ�����ڃȲ���ؓ؟�����ɼ��Ĺ��c���M���������\��̎�����ڎ����ں�벿�ֲɼ����������뷴��ȴ�W��ؓ؟�����惦�Ĺ��c�t�ڎ�����ǰ�벿���xȡ���r�W������Ȼ���M�д惦��ͨ�^�@�N�r�gƬ���֙C�ƣ����Ա����x���_ͻ�����Ҳ���Ӱ푸����湝�c���\��Ч�ʡ�
3)������죬��߷����\�Ќ��r�ԡ����ڔ����惦���c�������ڷ����\�Ў����ڣ����딵���컨�M�r�g�^�L��ͬ�r������ӛ��L�ȵ��`���׃Ҳ�o�������r�g�����˲��_���ԡ����˱��C�ڎ����ڃ�����ӛ䛌������������·����������惦���c�����_��һ�K�^��ȴ�^��Ȼ���ڷ����\�Ў����ڃȣ��xȡ���r�W������ͨ�^�ȴ濽ؐӛ䛵����_�كȴ�^�ȣ������\�нY�����ȴ�^�������딵���졣
ͨ�^���ϼ��g��ʩ���γɃ�����Ĕ����ɼ�������D4��
5ͨ�ò���ϵ�y���r�ԃ����OӋ
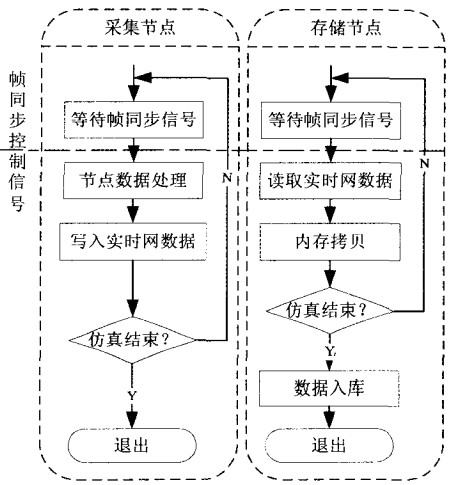
�D4�����Č��r�ɼ����̈D
�����ϵ�yͨ���ԺͿɔUչ�ԣ���ϵ�y������ͨ��Ӌ��Cƽ�_��WindowsNT����ϵ�y��ͨ����r�£�����nj��r����ϵ�y��WindowsNT���΄��{�ȡ��ȴ�����șC�����y�ԝM�㌧���댍����挍�Č��r��������ɇ���Č��r�����ɼ��΄գ�ϵ�y���OӋ�c���F�^���У���Ҫ�����ׂ������M�Ѓ����OӋ��
5��1�����
��WindowsNT����ϵ�y�У��Д���Ҫ��I��O�O�䡢̎�����r犻r���a�������Ա�����(���_)�����(�P�])��WindowsNT���û��ڃ��ȼ��ɓ��ȵ��Д����C�ƣ�ͨ�^“�Д�Ո��”(IRQL)���Ԍ��Д�Դ�����ȼ������^�߃��ȼ����Д�ɓ����^�̓��ȼ��Д�õ�����l5J����Ĭ�J��B�£�WindowsNT���ⲿ�Д�ֶ����_���ģ������䃞�ȼ������κ��Ñ��M�̡���ˣ����ڌ��r��Ҫ���^�ߵđ��È��ϣ���Ҫ���ηDZ�Ҫ���ⲿ�Д࣬���C���r�M�̌�CPU�YԴ�ă���ʹ�Ùࡣ
ÿ��̎��������һ��IRQL�O�ã���ֵ�Q����̎�������Խ�����Щ�Дࡣ��WindowsNTϵ�y�У����đB���̿���ͨ�^�Ⱥ˺���KeRaiseIrql()�������ʹ�õ�̎������IRQL���ȼ����Ķ����Է��i���е��ڻ���ڴ�IRQL���Д࣬�_�����ڷ�����ԓ�Д�ĵ�̎����������ͬ�����^�ͼ����Д����ȡ������ε��Д�������һ��̎����̎���������ֱ��IRQL���͡��ڱ�ϵ�y�У�ͨ�^���đB���O���ӳ����O��̎����IRQL���ȼ������ηDZ�Ҫ�Д࣬���C�������յČ��r�ԡ�
5��2���ȼ�����
ͨ�^�Д�����������ηDZ�Ҫ�Д࣬��һ���̶��Ϝp���˲���ϵ�y�IJ��_���ԣ���WindowsNT�Ǔ���ʽ���΄ղ���ϵ�y�����û��ڃ��ȼ��ē���ʽ�{�Ȳ��ԣ��Ķ��o���̵Ĉ��Ў����˲����A�y�ԣ�����б�Ҫ�M�Ѓ��ȼ����ơ��ڲ���ϵ�y�Ȳ���WindowsNTʹ��32�����̃��ȼ���������0��31������Win32API�^�c��Win32API���������ڄ����M�̕r����ă��ȼ��ȼ�(���r���������м�����e��)�M���M�̣�Ȼ�������M���и������̵��������ȼ�(�r�g�oҪ������������ϼ����м������¼�����ͼ��Ϳ��e��)�M�����̡�WindowsNT�Ծ��̞��λ�M���{�ȣ��������]�o���{�ȵľ��̌����Ă��M�̡�
�ڱ�ϵ�y�У�ͨ�^win32����SetPriorityClass()��SetThreadPriority()�O�þ��̃��ȼ���r�g�P�I��J����ϵ�y�{�����x�ϱ��C�����x���Č��r�ԡ�
5��3̓�M�ȴ����
WindowsNT���û���ƽ��32λ��ַ���g��̓�M�ȴ�ϵ�y�����ēQ�룯�Q����Ӱ푌��rϵ�y�Ŀ��A�y�ԡ����]�����r��������WindowsNTͨ�^���´�ʩ�pСӰ푣����r���ȼ����̲����Ãȴ潻�Q�����ܓQ�Ӱ푣�NT���S���ó�����Լ��i���ȴ�(ʹ��VirtualLock()API)�����ܓQ퓵�Ӱ푡�
��ˣ��ڱ�ϵ�y�У�ͨ�^����i���������P�I����i�����ȴ��У��������Q���ȴ档Win32API����VirtualLock()�Ɍ�VirtualAlloc()ָ���ăȴ�^���M���i������������Ҫ�i���r��ͨ�^VirtualUnlock()�M�н��i�����ͨ�^VirrualFree()�M��ጷš�
6����Y������
������C���OӋ�����ɼ�ϵ�y�Č��r�ԣ��OӋ���l���_չ���ַ��棺
1)����һ�����湝�c�M�Д����ɼ����������������ɔ����惦��
2)��yӋ���H�Ĕ����ɼ��r�g�������Ԏ�ͬ����ʽ���M�������һ�Δ����ɼ�֮��ͨ�^�Д��¼��M�й��c�gͨ�ţ��M����һ����
3)ÿ�������ڲɼ���������30��double�͔������ɼ��Δ���30�f�Σ�
4)�����\���У��ڔ�������������\��������������ɔ_���أ����씵���ɼ��ķ����ԡ��O��Ӌ�r�^�g�錍�r�W���딵����������ݔ���xȡ���r�W�����̓ȴ濽ؐ�Ŀ��r�g���_չ����ԇ�ýY����D5��ʾ��
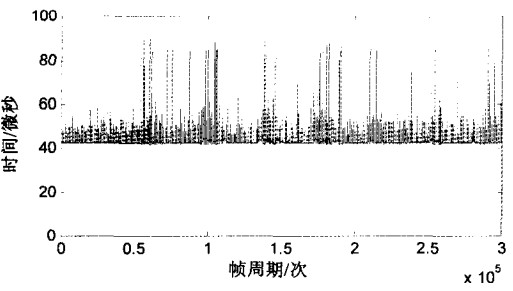
�D5�����ɼ��r�g�yӋ�Y���D
�ɈD5��֪����ͬ�r�\����������ĸɔ_�l���£�һ�Δ����ɼ��r�g�����^100�룬�������1��17�룬����ԓ���r�����ɼ�ϵ�y�܉F���١������Ĕ����ɼ�����ݔ�ʹ惦��
���⣬����ͬ�l��������ᘌ�����ϵ�y�ă������l�Fһ�Δ����ɼ��r�g�����_4��5���룬���^��ϵ�y������Ҫ�Ķ���C��ͨ�ò���ϵ�y���r�ԃ����OӋ����Ч�ԡ�
7�Y���Z
ͨ�^ᘌ��Ե�ϵ�yܛӲ���Y���OӋ�����������ɼ��������̣��Լ�ͨ�ò���ϵ�y���r�ԃ����OӋ�Ȳ��E�����F�˹������Č��r�����ɼ�ϵ�y�����`���ñ�����ԓϵ�y�܉��m���댍��������Ď����ڿ��ƣ����\�����ܷ�����δ���F�G�����e�`�F�M���˷�Ş�����댍�����ϵ�y�Č��r�����ɼ��c��������
����ͨ��Ӌ��Cƽ�_�ͳ���ķ���ȴ�W�j�aƷ����
���r�����ɼ�ϵ�y��������Ч������ӡ���Ϣ���g�����³ɹ�������ϵ�y���������죬���ĵ��OӋ˼��Ҳ�ɞ����ϵ�y���O�ṩһ���ą����ͽ��b��
|

