|
�M�B��KingviewPid�ؼ�ʹ�÷���
KingviewPid�ؼ��ǽM�B���ṩ�����ڌ��^�����M���]�h���ƵČ��ÿؼ���ͨ�^ԓ�ؼ����Ñ����Է��������PID���ơ�
һ���ؼ����ܣ�
1��pid�����㷨���˜���,�֞�������ݔ���ͷ������á�
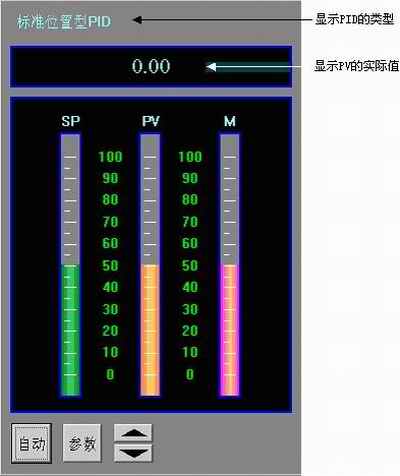
2���@ʾ�^��׃���ľ��_ֵ���@ʾ����[-999999.99~999999.99]��
3���ٷֱ��@ʾ�O��ֵ��SP�������Hֵ��PV�����ք��O��ֵ��M����
4���_�l��B�¿��O�ÿؼ��Ŀ��w���ԡ��O��/���������ͅ����O����
5���\�Р�B�¿��O��PID�������ք��Ԅ��ГQ��
����ʹ���f����
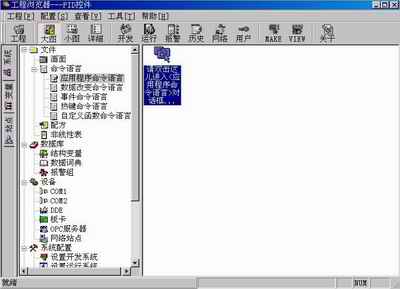
1���ڮ����в���ؼ����M�B������ˆ��о�\����ͨ�ÿؼ������ڹ������ІΓ�������ͨ�ÿؼ������o���ڏ����Č�Ԓ�����x�� ��Kingview Pid Control�����Γ��_����
2������������I�����τӣ��ڮ������L�Ƴ�����^��
�D1 �ؼ�����
3���O�ÄӮ��B�ӣ��p���ؼ����x�����I�ˆ��ЄӮ��B�ӣ��ڏ����Č�������O�ÿؼ����Q����Ϣ��
��1����Ҏ��
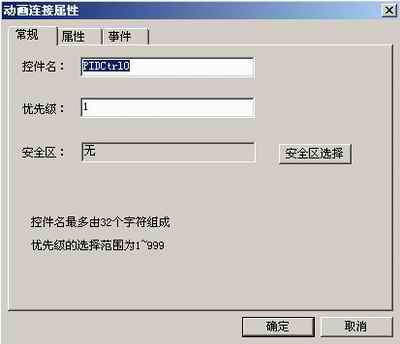
�D2 �Ӯ��B�ӌ��ԡ���Ҏ
�O�ÿؼ����Q�������ϽM�B�����P�����Q���x��Ҏ�������磺PIDCtrl0��
���ȼ����ǿؼ��IJ������ȼ���������1~999��
��ȫ�^����ȫ�^ֻ���S�x��
��2������ ��� �P����
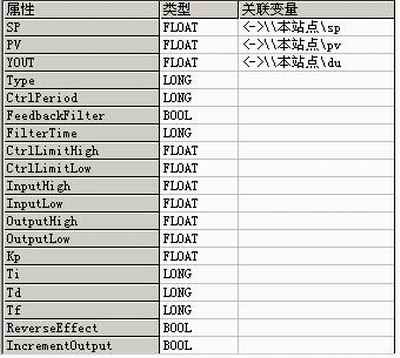
�D3�Ӯ��B�ӌ��ԡ�����
SP��FLOAT�����������O��ֵ��
PV��FLOAT���������ķ���ֵ��
YOUT��FLOAT����������ݔ��ֵ��
Type��LONG��PID����͡�
CtrlPeriod��LONG���������ڡ�
FeedbackFilter��BOOL����������V����
FillterTime��LONG���V���r�g������
CtrlLimitHigh��FLOAT�����������ޡ�
CtrlLimitLow��FLOAT�����������ޡ�
InputHigh��FLOAT���O��ֵSP�ĸ��ޡ�
InputLow��FLOAT���O��ֵSP�ĵ��ޡ�
OutputHigh��FLOAT������ֵPV�ĸ��ޡ�
OutputLow��FLOAT������ֵPV�ĵ��ޡ�
Kp��FLOAT������ϵ����
Ti��LONG���e�֕r�g������
Td��LONG���֕r�g������
Tf��LONG���V���r�g������
ReverseEffect��BOOL���������á�
IncrementOutput��BOOL���Ƿ�������ݔ����
DeadBandLow��Long���o��
Status��BOOL�����ԄӠ�B��
M��FLOAT���ք��O��ֵ��
PercentRange��float���քӕr�{�����{�����ȣ�Ĭ�J��1�����������\�Еr���c�����o���ք��{�����������{���˅��������������ܡ�
ע�⣺��ʹ��׃���P�r��ֻ�пؼ���̎�Į���̎�ڼ����B�����ƹ��ܲŕ����С�
��3�������Z���е�ʹ��
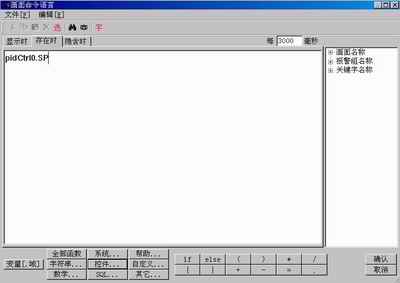
A����ʹ��׃���P�r��
�˕r��ֻ�пؼ���̎�Į���̎�ڼ����B�����ƹ��ܲŕ����У���������д��ڶ������棬����PID�ؼ����沢������̎�ڼ����B���t��ԓ���������Z�Եķ�ʽʹ��PID�ؼ��������ڿؼ���̎����Į��������Z���У�ʹ���xֵ�ķ�ʽ���@ʾ�ؽ��QPID����ֵ���x���������Z���еĿؼ���������ʾ��
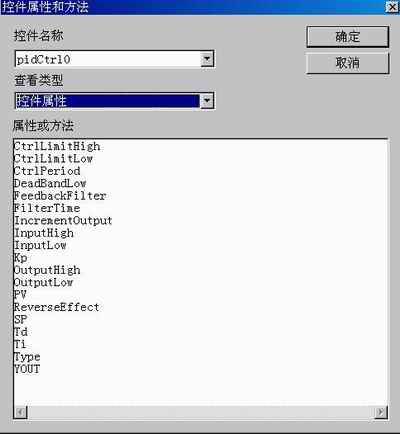
�D4�ؼ����Ժͷ���
�ڌ��Ի����x���������x헣��ڴ��ڕr���F�����Z�ԣ����҂��x��SP�p�����t�����@ʾ��
�D5���������Z��
�@ʾ�r�����������[��׃���@ʾ�r���t���@ʾ�r�������е������Z�Ծͱ�����һ�Ρ�
���ڕr��ֻҪԓ������ڣ��t�����ڕr�� �����е������Z�Ծͷ��Ͱ����O���ĕr�g���ڈ��С�
�[���r�����������@ʾ׃���[�����P�]�r���t���[���r�������е������Z�Ծͱ�����һ�Ρ�
ݔ�������Z�ԣ����£�
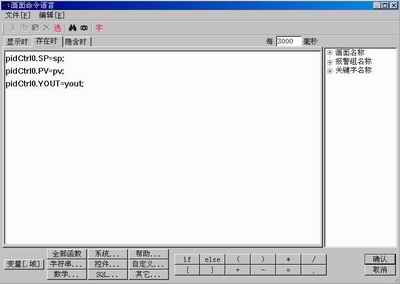
�D6���������Z��
���У�SP���O��׃����PV�鷴��׃����YOUT�������ݔ��׃����
B����ʹ�ù��̞g�[���đ��ó��������Z�ԕr�����ó����Z�Կ����ڳ��ӕr���С��P�]�r���л��ڳ����\�����g�� �ڈ��С�
��1�����_���̞g�[����
�D7���������Z��
���ó��������Z�Ե��\�Еr����ͬ���档�������£�
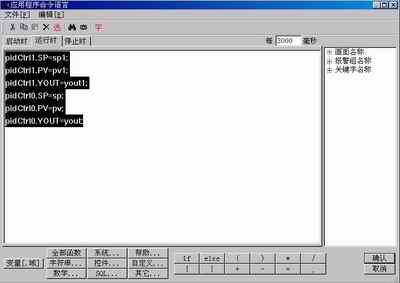
�D8���������Z��
4���O�ÿؼ����ԣ��x��ؼ����I�ˆ��С��ؼ����ԡ��������ؼ����Ќ���퓣��ɷքe�O�������ԣ�
��1�����w���ԣ�
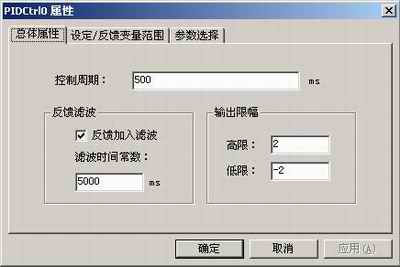
�D9 ���w����
�������ڣ�PID�Ŀ������ڣ������100���������ҿ������ڱ�횴���ϵ�y�IJɘ����ڡ�
�����V����Pvֵ�ڼ��뵽PID�{����֮ǰ���Լ���һ����ͨ�V������
ݔ��������������ݔ����Yout��ֵ��
��2���O��/����׃��������
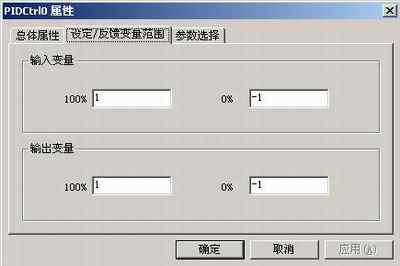
�D10 �O��/����׃������
ݔ��׃�����O��ֵsp���߷���ֵpv���������ֵ��100%������Сֵ��0%���Č��Hֵ��
�O��ֵsp�c����ֵpvһ�����ֵ����Сֵ��ͬ��
ݔ��׃����ݔ��ֵYout���������ֵ��100%������Сֵ��0%���Č��Hֵ��
��3�������x��
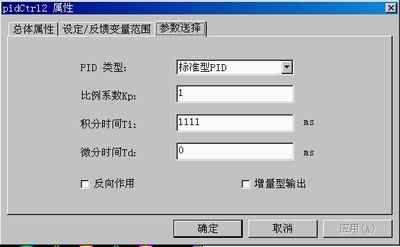
�D11 �����x��
PID��ͣ��x��ʹ�ؘ��͡�
����ϵ��Kp���O������ϵ����һ��ȡֵ������1-10
�e�֕r�gTi���O���e�֕r�g���������Ƿe��헵�ݔ����ÿ�����c�����ݔ������ȵ�ֵ����Ҫ�ĕr�g��һ��ȡֵ������1000-5000ms
�֕r�gTd���O���֕r�g���������nj�����ͬ��ݔ���{��������헳�ǰ�ڱ����푑��ĕr�g��һ��ȡֵ��0
�������ã�ݔ��ֵȡ����
������ݔ����������ݔ���������͡�
5���\�Еr�IJ�����
�ք�/�Ԅӣ��Ԅӕr���������{������Ͷ�롣�քӕr��������ݔ�����ք��O��ֵ���^�����D�Q��Č��Hֵ���ք��O����M����YOUT��ֵ��
�ք�ֵ�O������/�£���ÿ���c���ք��O��ֵ����/�p��1%
6���\�Еr�ą����O�ã���D12��ʾ
�˜���PID����������ϵ�����e�ֳ������ֳ�����PID�ij�Ҏ����
�������ã�ݔ��ֵȡ��
�ք���r���O���ք��{�����ʣ�
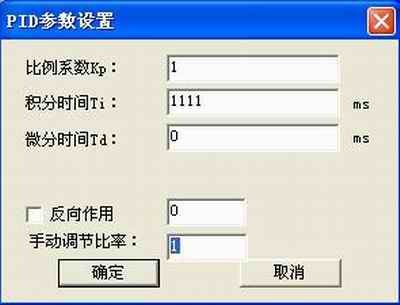
�D12 PID�����O��
����Ŀǰ��֧�ֵĹ��ܣ�
1�������͌��r�����F��
2���������ڲ��ܵ��ڲɘ����ڡ�
�M�B�� �M�Bܛ�� ���A ELO�|���@ʾ�� �|���@ʾ�� ���ؙC ���A���ؙC ���A�ɼ��� ���A�����ɼ��� �����ɼ��� һ�w������վ ���Aһ�w������վ ���Aģ�K ���A����ģ�K �����ɼ�ģ�K ���A�����ɼ�ģ�K ���I��̫�W�����ɼ�ģ�K ���I��̫�W���Q�C ���A���I��̫�W���Q�C ���ڷ����� ���A���ڷ����� ���M늙C���ƿ� �ŷ�늙C���ƿ� ���A���M늙C���ƿ� ���A�ŷ�늙C���ƿ� ���M/�ŷ�늙C���ƿ� ���A���M/�ŷ�늙C���ƿ� ��y�C ܊�üӹ̙C �മ�ڿ� ���A�മ�ڿ� ܊�ùPӛ�� �������� ���ؙC�� �|���� ELO�|���� �˙C���� CAN��
|

