
機器人領(lǐng)域什么專業(yè)比較有前途?
http://www.gjzbw99.com 2023-12-08 10:58 來源:機器人大講堂
奔馳汽車在德國的辛德爾芬根工廠,4500臺工業(yè)機器人組成的超級智能工廠正在如火如荼的開展生產(chǎn),這家工廠早在1971年就開始使用機器人。目前在全德范圍內(nèi)服役的機器人約為20萬臺,2025年預(yù)計將達(dá)到100萬臺。
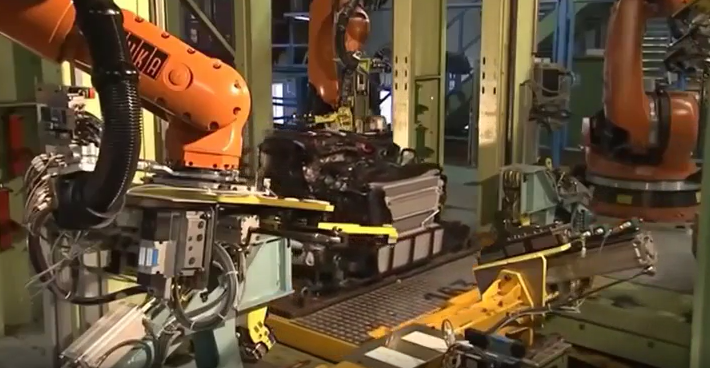
德國辛德爾芬根工廠自動化流水線
另據(jù)德國《法蘭克福匯報》引述紐倫堡就業(yè)市場和職業(yè)研究所的報告稱,未來幾年,“工業(yè)4.0”將在德國創(chuàng)造43萬個新崗位,同一時間也會造成49萬工人失業(yè)。未來產(chǎn)業(yè)結(jié)構(gòu)正在快速調(diào)整。
今天的中國同樣面臨產(chǎn)業(yè)結(jié)構(gòu)化調(diào)整的問題,因此對于大眾來講,未來的選擇比努力更為重要,也就是在最近幾周,機器人大講堂收到了來自不同地區(qū)的網(wǎng)友咨詢。在機器人領(lǐng)域,哪些研究方向和專業(yè)市場前景更明朗一些?
▍目前計算機視覺、運動規(guī)劃控制、手臂抓取等是機器人類目最為火爆的賽道
我們在選擇專業(yè)的時候,要明白一點,學(xué)術(shù)性前沿可以允許天馬行空的想法與創(chuàng)意,但如果要落到產(chǎn)品應(yīng)用層面,則需要大量的案例以及數(shù)據(jù)的積累,機器人的高效平穩(wěn)運行是商業(yè)公司最為看重的地方。
縱觀德國與美國兩個市場,拋開最近幾年爆火的大模型與AI方向,基于傳統(tǒng)機器人研究方向來看,計算機視覺(深度學(xué)習(xí)方向)、機械臂抓取操作、運動規(guī)劃與控制幾個方面都是需求量非常旺盛的領(lǐng)域,就業(yè)前景相對明朗,薪資水平普遍較高。

具體來看,排名熱度第一的當(dāng)屬深度學(xué)習(xí)的計算機視覺方面,其主要領(lǐng)域應(yīng)用廣泛,包括自動駕駛領(lǐng)域,智能醫(yī)療以及工業(yè)自動化方向。機器人領(lǐng)域是計算機視覺(深度學(xué)習(xí))方面的一個重要分支,包括在結(jié)構(gòu)與非結(jié)構(gòu)化環(huán)境下,用于圖像或視頻中檢測和定位特定對象。此前視頻曝光的特斯拉Optimus曝光的自主地將物體按顏色進行分類,應(yīng)用到的就是視覺技術(shù)及完全本地部署的神經(jīng)網(wǎng)絡(luò)相結(jié)合,從而可以迅速適應(yīng)環(huán)境并完成多項任務(wù)。
而運動規(guī)劃控制部分通常與計算機視覺(深度學(xué)習(xí))是脫離不開的,在工業(yè)領(lǐng)域,運動規(guī)劃控制用于執(zhí)行復(fù)雜的裝配、焊接、噴涂等任務(wù)。在醫(yī)療領(lǐng)域,手術(shù)機器人則需要基于運動規(guī)劃與控制,配合定位系統(tǒng),實現(xiàn)手術(shù)機器人的精準(zhǔn)操控,這幾年越來越多的應(yīng)用在癌癥篩查的活檢軟組織穿刺方面。基于工業(yè)自動化與醫(yī)療這兩條賽道的商業(yè)化前景清晰,就業(yè)前景更好。
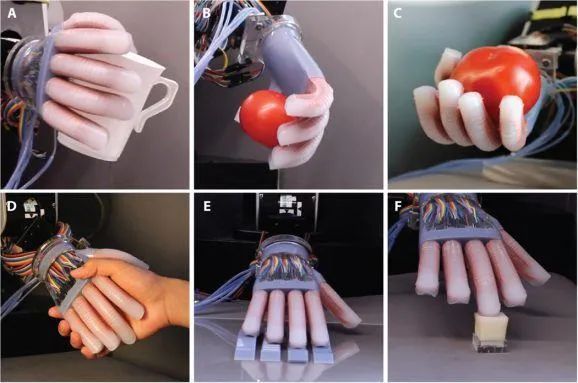
手臂抓取是機器人領(lǐng)域的末端應(yīng)用,工業(yè)領(lǐng)域的手臂抓取應(yīng)用主要集中在非結(jié)構(gòu)化環(huán)境下對物品的抓取成功率方面,其研究通常伴隨著視覺感知、運動規(guī)劃與控制一起進行。另一種基于軟機器人的手臂抓取是最近兩年關(guān)注度較高的領(lǐng)域,包括MIT、北航等高校和科研實驗室都在對軟機器人手臂抓取方面進行攻關(guān),目前基于軟機器人手臂自適應(yīng)抓取研究可能會成為一個新的行業(yè)增長點。
▍基于四足、雙足人形機器人的locomotion是就業(yè)的第二列縱隊
今年年初開始,基于足式機器人賽道開始變得愈發(fā)火爆,如果機器人領(lǐng)域就業(yè)這個問題放在去年甚至前年來回答,那么基于足式機器人的locomotion確實排不上號,但今年不一樣了,尤其是工信部下發(fā)了《人形機器人創(chuàng)新發(fā)展指導(dǎo)意見》,已將人形機器人提升至國家戰(zhàn)略高度,未來足式機器人市場規(guī)模將呈現(xiàn)井噴式增長。

但我們也必須要意識到一個問題,目前國內(nèi)機器人的硬件起步較晚,在運動平臺的選取方面,機器人普遍采用AGV模式,普遍研發(fā)成本較低。國內(nèi)基于四足與雙足機器人的研究平臺屈指可數(shù),且市場化落地仍在探討當(dāng)中。目前四足機器人主要聚焦在科研與巡檢兩條賽道,如行業(yè)頭部宇樹科技、云深處以及逐跡動力等企業(yè)。

宇樹Unitree B2行業(yè)四足機器人
從行業(yè)發(fā)展來看,歐美等國家對于雙足與四足的locomotion起步研究早,且需求大。基于該平臺的研究與開發(fā)條件較為完善,擇業(yè)需求較為廣泛。國內(nèi)方面,基于雙足與四足的locomotion研究呈現(xiàn)緩慢上升的態(tài)勢,且未來有望追平歐美第一梯隊。目前基于足式機器人的locomotion研究屬于價值洼地。隨著產(chǎn)業(yè)規(guī)模的不斷擴大,人才將會在未來幾年之內(nèi)出現(xiàn)供不應(yīng)求的局面。
▍機器人本體底層機電硬件系統(tǒng)是領(lǐng)域的第三縱隊
與前兩個縱隊不同,底層機電硬件系統(tǒng)是機器人領(lǐng)域投入周期最長,人才需要最多的縱隊。如果就職于研究所和高校實驗室,那么薪資的高低取決于你所選的行業(yè)火爆程度,但不需要擔(dān)心失業(yè)問題。而從企業(yè)層面來看,底層機電硬件系統(tǒng)的研發(fā)與投入需要研發(fā)周期與資源投入以及充沛的人才團隊,通常企業(yè)作為商業(yè)機構(gòu),市場獲利周期較長,且存在不確定性,因此并不愿意觸碰這個領(lǐng)域。

理工華匯自研一體化高爆發(fā)關(guān)節(jié)用內(nèi)藏型減速器
以人形機器人為例,國內(nèi)具備重點專利布局的集中在清華大學(xué)、北京理工大學(xué)、哈爾濱工業(yè)大學(xué)以及浙江大學(xué),這也是早期涉足人形機器人的高校研究機構(gòu)。近幾年高校開啟科研技術(shù)轉(zhuǎn)化方面的探索,并逐步開啟商業(yè)化道路。
從擇業(yè)方面來看,參與研究底層機電硬件系統(tǒng)就業(yè)場景廣泛,但不同賽道之間的差異化相對較為明顯,主要取決于賽道熱門程度以及商業(yè)化程度。
▍結(jié)語與未來:
目前機器人領(lǐng)域的人才需求以物理硬件為底層邏輯,向上延伸至足式機器人locomotion再到計算機視覺、運動規(guī)劃控制、手臂抓取領(lǐng)域。本文僅對當(dāng)前形勢下,基于現(xiàn)有行業(yè)發(fā)展現(xiàn)狀及需求程度對機器人擇業(yè)領(lǐng)域進行分析,但不排除今后機器人產(chǎn)業(yè)出現(xiàn)新爆發(fā)點,如今年3月以Chat GPT為代表的大語言模型得到普及,引發(fā)“具身智能”概念的興起,一定程度上加速機器人產(chǎn)業(yè)的智能化迭代。
對于從事機器人研究與學(xué)習(xí)的各位同學(xué),機器人這條賽道充滿著機遇與挑戰(zhàn),不管你目前選擇的是熱門賽道還是偏冷門賽道,都要明白一點,機器人產(chǎn)業(yè)輪動加快,相關(guān)技術(shù)與應(yīng)用正在快速切換。現(xiàn)在熱門的板塊不一定在未來持續(xù)熱門,人才供需結(jié)構(gòu)與產(chǎn)業(yè)格局正在加速調(diào)整。你選擇熱愛的這條賽道,才是最適合你的職業(yè)成長軌跡。
相關(guān)新聞
- ? 佛山市人工智能與智能機器人產(chǎn)業(yè)聯(lián)盟成立,五大產(chǎn)業(yè)載體掛牌
- ? 工業(yè)機器人“排位戰(zhàn)”再升級,2025年上半年 TOP10廠商市占率達(dá)近65%
- ? 2025年自動化及運動控制市場趨勢洞察分析
- ? 福耀科技大學(xué)與海信共拓具身智能新賽道
- ? 均勝電子與阿里云達(dá)成AI全面合作 助力打造機器人智能體
- ? 具身智能機器人通信網(wǎng)絡(luò)聯(lián)創(chuàng)倡議在蓉發(fā)布
- ? 英偉達(dá)發(fā)售新一代人形機器人“大腦”:性能提高7.5倍,宇樹、優(yōu)必選等采用
- ? 新松機器人上半年實現(xiàn)營收16.6億元 研發(fā)與全球化雙線發(fā)力
- ? 仁新機器人完成數(shù)千萬元A輪融資,加碼工業(yè)具身智能技術(shù)研發(fā)
- ? 2025協(xié)作機器人市場半年報:二季度同比增長52%!各行業(yè)增長提速,碼垛、焊接場景表現(xiàn)亮眼
編輯精選
- ? 國內(nèi)首個!騰訊發(fā)布具身智能開放平臺
- ? 東土科技旗下子公司獲2.8億元戰(zhàn)略投資,國產(chǎn)操作系統(tǒng)生態(tài)加速成型
- ? 2025年中國伺服系統(tǒng)行業(yè):工業(yè)智造“心臟”的升級革命
- ? 全球首個全域5G數(shù)智AI工廠在重慶掛牌
- ? 臺達(dá)重磅發(fā)布11款工業(yè)自動化新品 以“N+種可能”驅(qū)動制造業(yè)數(shù)智躍遷
- ? 我國部署深入實施“人工智能+”行動
- ? 7月標(biāo)普全球中國制造業(yè)PMI降至49.5
- ? 柯馬完成對Automha的收購,進一步鞏固雙方在先進物流自動化領(lǐng)域的領(lǐng)先地位
- ? 官宣!拓斯達(dá)全球研發(fā)總部基地正式啟用
- ? 金融支持新型工業(yè)化,央行等七部門發(fā)文
工控原創(chuàng)
- ? 調(diào)查顯示:成本與安全驅(qū)動北美機器人加速普及
- ? 不止于觸摸:臺達(dá)DOP-300S 人機界面,吹響工業(yè)物聯(lián)網(wǎng)集結(jié)號
- ? 一文速覽七月工業(yè)自動化領(lǐng)域熱點新聞
- ? 2025數(shù)字化及智能制造技術(shù)論壇在青島圓滿落幕, 這些議題值得關(guān)注!
- ? ABB以本土化創(chuàng)新與AI賦能,引領(lǐng)中國機器人市場新篇章
- ? 一文get六月工控自動化大事
- ? ABB加速器中國周:當(dāng)AI邂逅硬核工業(yè),一場自下而上的智造革命
- ? 點擊了解5月工控圈那些事兒
- ? 分拆上市還是出售?ABB機器人業(yè)務(wù)將何去何從
- ? 打造標(biāo)桿案例及生態(tài)圈,ABB全力推動Ethernet-APL應(yīng)用加速


